В статье рассматриваются вопросы совершенствования погрузочно-разгрузочных работ на предприятиях АПК. Разработаны оригинальные конструкции грузозахватных устройств для перемещения штучных грузов, позволяющие минимизировать ручной труд на работах по закреплению и отсоединению груза от грузоподъемной машины. Представлены теоретические расчеты по определению параметров запатентованных устройств.
Введение
С каждым годом в агропромышленном комплексе и на промышленных предприятиях увеличивается объем погрузочно-разгрузочных работ. В настоящее время на транспортных погрузочно-разгрузочных и складских операциях занято до 25% всех трудящихся. В связи с этим становится очевидной важность вопроса механизации, так как здесь имеются неиспользованные резервы высвобождения рабочей силы.
Механизация погрузочно-разгрузочных работ является проблемой комплексной, которая включает не только вопрос оснащения грузовых фронтов современным подъемно-транспортным оборудованием, но также и вопросы совершенствования существующих и разработки новых конструкций специальных грузозахватных приспособлений к универсальным кранам и погрузчикам, клещевых захватов, грейферов, поворотных захватов-манипуляторов и т.д. Применение этого оборудования позволит резко повысить производительность машин, значительно расширить сферу их применения и снизить затраты ручного труда.
Целью наших исследований явилось разработка конструкции и обоснование параметров захватов для штучных грузов
Основная часть
Для достижения поставленной цели был проведен патентный поиск по грузозахватным устройствам.
В Белорусском государственном аграрном техническом университете разработаны оригинальные конструкции захватов для перемещения штучных грузов.
Захват для переноски и последующего подвешивания рольганга с целью их термообработки в нагревательной печи [1] (рисунок 1).
Захват-подвеска содержит подковообразный корпус 1 и средство для фиксации груза, включающее поперечину 2 и палец 3. Корпус 1 с поперечиной 2 образуют внутреннее отверстие для обхвата изделия (рисунок 1, а). Корпус 1 выполнен с проемом и направляющей, представляющей собой выполненные в стенках проема корпуса 1 прямолинейные пазы 4 и 5 (рисунок 1, б и в). Поперечина 2 одним концом шарнирно крепится в пазу 4 прямолинейной стороны корпуса 1 осью 6 (рисунок 1, в), а второй конец поперечины 2 входит в паз 5 прямолинейной стороны корпуса 1 и фиксируется выступом 7 пальца 3, проходящим через прямолинейный паз 5 (рисунок 1, г).
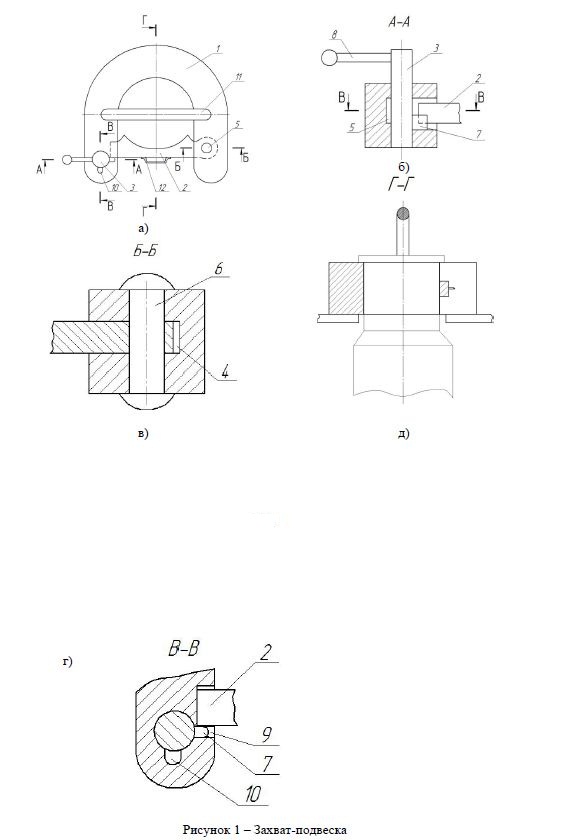
Рисунок 1 – Захват-подвеска
Палец 3 может подниматься по вертикали и поворачиваться с помощью рукоятки 8. В нерабочем положении выступ 7 устанавливается параллельно прямолинейному пазу 6, а в рабочем положении - перпендикулярно прямолинейной стороне корпуса 1 и устанавливается в поперечную прорезь 9, расположенную в прямолинейном пазу 6 (рисунок 1, г). Верхняя стенка имеет прорезь 10, размеры которой соответствуют ширине и длине выступа 7, и позволяет установить палец 3 в корпус 1.
К корпусу 1 крепится скоба 11, а к поперечине 2 – ручка 12.
Пользуются захватом-подвеской следующим образом.
Поворачивая рукоятку 8 посредством пальца 3 по часовой стрелке, совершают поворот выступа 7 до положения параллельного прямолинейной стороне корпуса 1. После этого с помощью ручки 12 производят поворот поперечины 2 в крайнее правое положение, освобождая пространство для надевания корпуса 1 на шейку ролика (рисунок 1, в), после чего поворачивая поперечину 2 в обратную сторону и вводя свободный ее конец в прямолинейный паз 5, обжимают шейку ролика. Это положение фиксируют поворотом рукоятки 8 против часовой стрелки, пока выступ 7 не опустится в поперечную прорезь 9, что ведет к закреплению поперечины 2 и ролика захватом- подвеской. Крюк грузоподъемного механизма цепляют за скобу 11 и осуществляют подъем. Ролик занимает вертикальное положение, его переносят на специальный стенд с вырезами, на края которых опирают края захвата-подвески. После заполнения стенда ролика его размещают в камере (печи) для термообработки.
Использование предлагаемого захвата-подвески позволяет повысить удобство пользования.
Для безопасной работы захвата-подвески необходимо обеспечить прочность корпуса 1, критерии работоспособности которого определяются прочностью на срез и смятие его грузом.
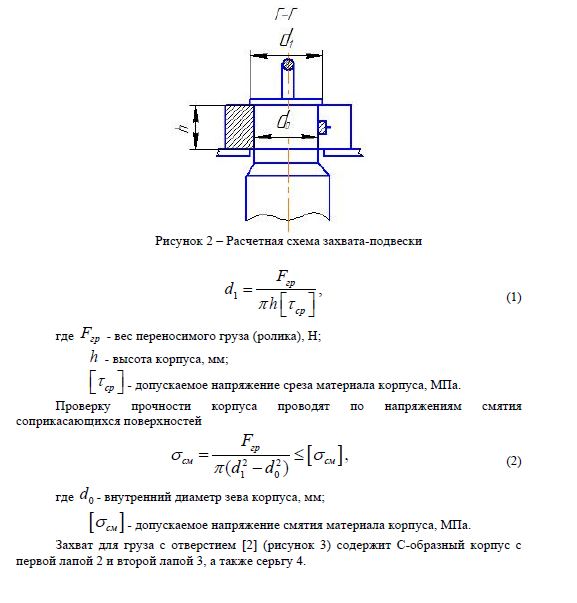
Рисунок 2 – Расчетная схема захвата-подвески
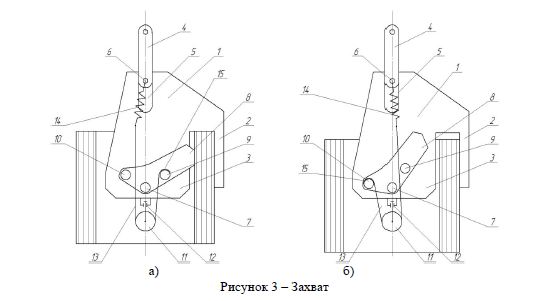
Рисунок 3 – Захват
В С-образном корпусе 1 выполнен продольный паз 5, в который с возможностью свободного в нем перемещения входит палец 6 серьги 4. На второй лапе 3 оси 7 шарнирно установлен прижим 8, который конструктивно выполнен как двуплечий рычаг и имеет два расположенные на равном расстоянии от оси 7 поворота два штифта 9 и 10, а к С-образному корпусу 1 на оси 7, проходящей через центры пальца 6 и оси 7, закреплен блок 11 с возможностью поворота вокруг подвеса 12. Блок 11 огибает канат 13, один конец которого через пружину 14 закреплен на пальце 6, а второй конец имеет крючок 15, который может надеваться на шрифты 9 и 10.
В исходном положении (рисунок 3, а) С - образный корпус 1 висит на пальце 6 серьги 4, прижим 8 поднят вверх посредством каната 13, зацепленного крючком 15 за шрифт 9 прижима 8. Для транспортировки груза при вертикальном положении оси его отверстия захват опускают на груз, вводя в отверстие вторую лапу 3. При дальнейшем опускании серьги 4 палец 6 позволяет ослабиться канату 13. Прижим 8 опускается под действием собственного веса вниз и входит в контакт с поверхностью груза. Крючок 15 каната 13 зацепливают за штифт 9. Серьгу 4 поднимают по продольному пазу 5, натягивает через пружину 14 канат 13, который через блок 11 и крючок 15 передает усилие, направленное вниз на штифт 9, тем самым увеличивая силу прижатия, и соответственно силу трения между прижимом 8, грузом и первой лапой 2, происходит зажатие груза (рисунок 3, б). Далее груз поднимается, переносится в нужное место и опускается, вновь занимая вертикальное положение. Для освобождения захвата от груза серьгу 4 опускают, палец 6, перемещаясь по продольному пазу 5, ослабляет натяжение каната 13. Перекинув вручную крючок 15 на штифт 10, при этом блок 11 поворачивается относительно направляющей 12 на 180º.
Работа с захватом осуществляется следующим образом.
Поднимают серьгу 4, палец 6, перемещаясь по продольному пазу 5, натягивает через пружину 14 канат 13, который через блок 11 и крючок 15 передает усилие, направленное вниз на штифт 10, тем самым поворачивая прижим 8 в обратную сторону, выводя его из соприкосновения с грузом.
При дальнейшем подъеме захват снимается с груза и возвращается в исходное положение. Пружина 14 выполняет роль демпфера и компенсирует деформацию каната 13.
Захват надежен в работе, так как сила трения между соединяемыми деталями возрастает за счет увеличения силы прижатия прижима.
На рисунке 4 приведена расчетная схема захвата, представленного на рисунке 3.
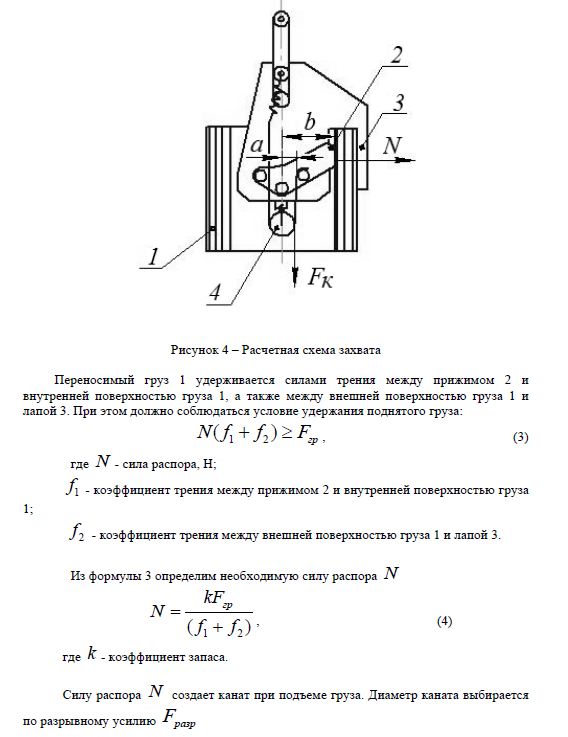
Рисунок 4 – Расчетная схема захвата
Переносимый груз 1 удерживается силами трения между прижимом 2 и внутренней поверхностью груза 1, а также между внешней поверхностью груза 1 и лапой 3. При этом должно соблюдаться условие удержания поднятого груза:

Выводы
- обоснована необходимость создания специальных захватов для штучных грузов, позволяющих повысить производительность труда;
- разработаны оригинальные конструкции грузозахватных устройств для перемещения штучных грузов;
- приведены теоретические расчеты по определению параметров запатентованных устройств.
Литература
- Захват-подвеска : патент 17916 C1 Респ. Беларусь, МПК B 66C 1/44 / И.Н.Шило, К.В. Сашко, Н.Н.Романюк, А.В. Щетько; заявитель Белорус. гос. аграр. техн. ун-т.– № a 20111047; заявл. 28.07.2011; опубл. 28.02.2014 // Афiцыйны бюл. / Нац. цэнтр iнтэлектуал. уласнасцi.–2014.–№ – С.88.
- Захват: патент 17915 C1 Респ. Беларусь, МПК B 66C 1/44 / И.Н.Шило, К.В. Сашко, Н.Н.Романюк, А.В. Щетько ; заявитель Белорус. гос. аграр. техн. ун-т.– № a 20111043; заявл. 28.07.2011 ; опубл. 28.02.2014 // Афiцыйны бюл. / Нац. цэнтр iнтэлектуал. уласнасцi.–2014.–№ – С.87.
- Александров, М.П. Подъемно-транспортные машины: учеб. для машино- строительных спец. вузов. /М.П. Александров – М.: Выш.шк., 1985. – 520 с.
- Кузьмин А. В., Марон Ф. Л. Справочник по расчетам механизмов подъемно- транспортных машин. – 2-е изд., перераб. и доп. – Мн.: Выш. Шк., 1983. – 350с., ил.
- Захват : патент 17915 C1 Респ. Беларусь, МПК B 66C 1/44 / И.Н.Шило, К.В. Сашко, Н.Н.Романюк, А.В. Щетько ; заявитель Белорус. гос. аграр. техн. ун-т.– № a 20111043 ; заявл. 28.07.2011 ; опубл. 28.02.2014 // Афiцыйны бюл. / Нац. цэнтр iнтэлектуал. уласнасцi.–2014.–№ – С.87.