Современные системы векторного управления прошли долгий путь развития и в настоящее время являются наиболее распространенными среди систем электропривода переменного тока. Они позволяют просто и эффективно управлять такими сложными объектами как асинхронный двигатель с короткозамкнутым ротором (АД), что в свою очередь, позволяет существенно расширить область его применения, почти полностью вытесняя из автоматизированных управляемых приводов двигатели постоянного тока. Это связано в первую очередь с развитием силовой электроники, позволяющей создавать надежные и относительно дешевые преобразователи, а также с развитием быстродействующей микроэлектроники, способной реализовать алгоритмы управления практически любой сложности. Поэтому высококачественный асинхронный векторный электропривод (АВП) в настоящее время является по существу техническим стандартом.
Большинство электрических машин переменного тока предназначено для работы в трехфазных сетях, поэтому они строятся с симметричными трехфазными обмотками на статоре, причем МДС этих обмоток распределены в пространстве по закону близкому к синусоидальному, т.е. МДС, создаваемая k-й обмоткой в точке, отстоящей от оси этой обмотке на угол α k равна -Fak=FkOcos □ k, где FkO - МДС, соответствующая оси k-й обмотки.
Синусоидальность распределения позволяет представить МДС или пропорциональные им токи обобщенным пространственным вектором на комплексной плоскости, т.е. вектором, представляющим собой геометрическую сумму отрезков, построенных на пространственных осях фазных обмоток и соответствующих мгновенным значениям фазных МДС или токов. Нри этом проекции обобщенного вектора на оси фазных обмоток в любой момент времени будут соответствовать мгновенным значениям соответствующих величин.
Нри симметричной трехфазной системе обмоток обобщенный вектор тока можно представить в виде:
Обозначение вектора строчным символом принято для указания на то, что его координаты являются функциями времени аналогично тому, как строчные символы при обозначении скалярных величин указывают на мгновенное значение.
Нри таком представлении фазные токи ia, ib и ic можно рассматривать как проекции вектора i на соответствующие оси фазных обмоток (рис. 1 а)). Если произвести построение вектора i , откладывая значения фазных токов ia, ib и ic на осях обмоток (рис. 1 б)), то суммарный вектор окажется в полтора раза больше того вектора, проекции которого соответствуют фазным токам. Ноэтому в выражении (1) присутствует коэффициент 2/3, приводящий модуль суммарного вектора к такому значению, которое при проецировании на оси фазных обмоток даст истинные значения фазных токов.
78
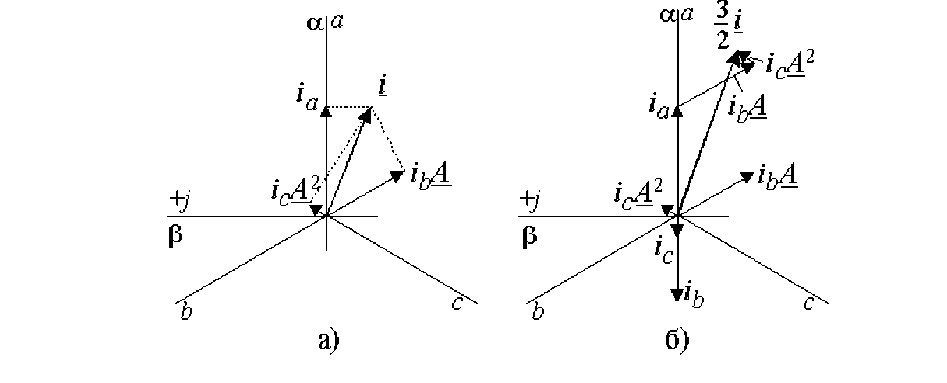
Рисунок 1 -Разложение вектора тока на фазные проекции (а) и построение обобщенного вектора тока (б)
проекции
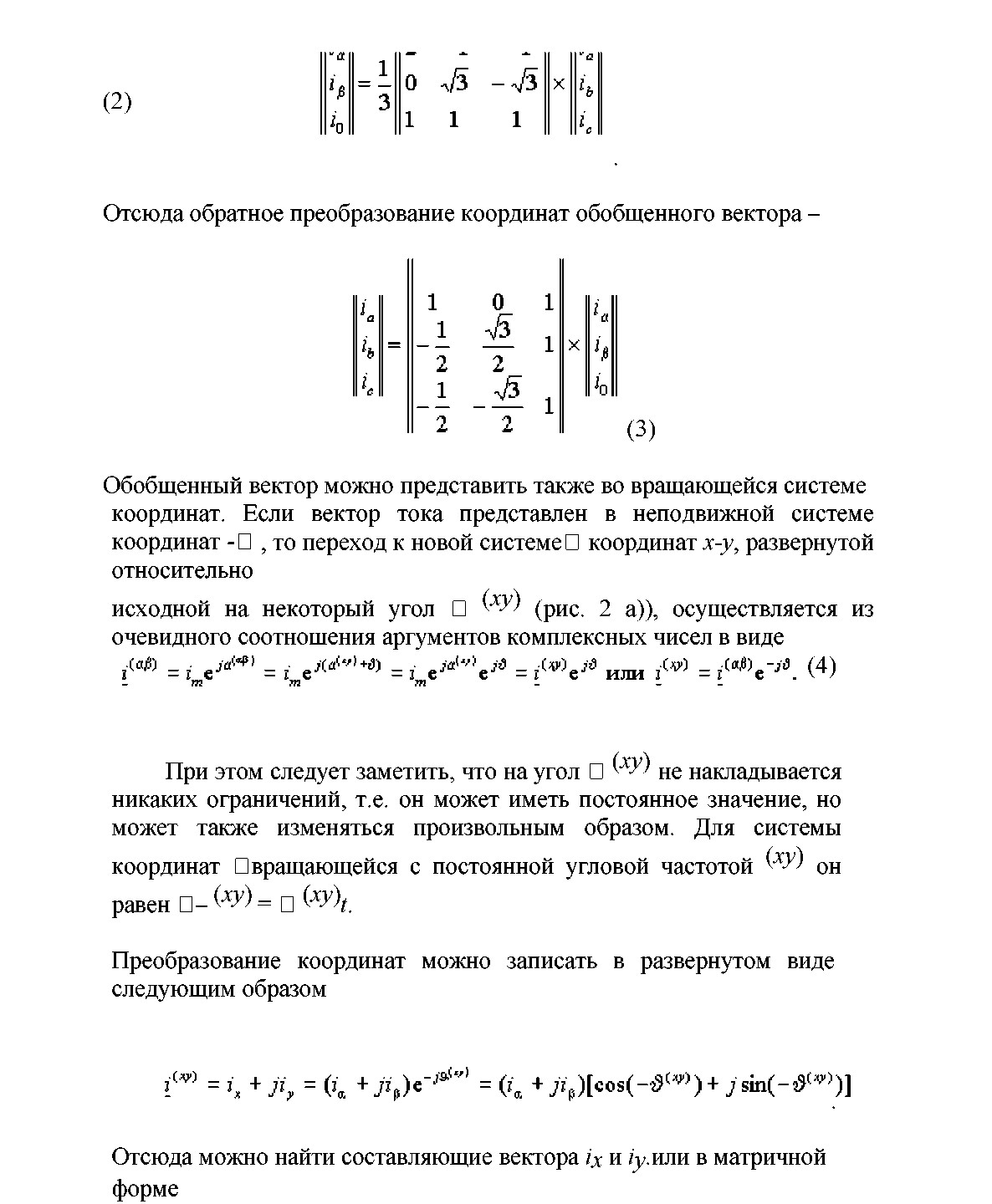
на оси трехфазных обмоток к представлению через проекции на оси комплексной плоскости эквивалентно преобразованию трехфазной системы обмоток в эквивалентную двухфазную. В матричной форме это преобразование можно записать в виде
79
80
81

Обобщенными векторами можно представить также напряжения u , при□и потокосцепления этом все свойства рассмотренного выше обобщенного вектора тока будут присущи и этим векторам.