Расчет переходных процессов в нелинейных цепях представляет задачу составления и интегрирования одного или нескольких дифференциальных уравнений состояния цепи.
Известно аналитическое решение лишь нескольких отдельных типов нелинейных дифференциальных уравнений. Большая группа методов их решения основана на линеаризации характеристики в малой или в ограниченной области. Они основаны на графоаналитических, численных методах или кусочно-аналитических. Поскольку для расчета нелинейных цепей неприменим метод наложения, то и при расчете переходных процессов нельзя определять токи и напряжения различных участков цепи как сумму свободной и принужденной составляющих. Нельзя применить для исследования реального переходного процесса и операторный метод, так как этот процесс описывается системой нелинейных дифференциальных уравнений.
Кроме того, нелинейность цепи может привести не только к чисто количественному изменению переходного процесса (другие максимальные значения токов и напряжений, различная скорость протекания процесса), но иногда и к качественным изменениям, например, к возникновению автоколебаний.
Расчет переходного процесса в нелинейной цепи сводится к решению системы нелинейных дифференциальных уравнений. Общего метода, пригодного для решения любой системы, не существует. Имеется довольно много различных, весьма приближенных способов решения, пригодных в каких-то частных случаях.
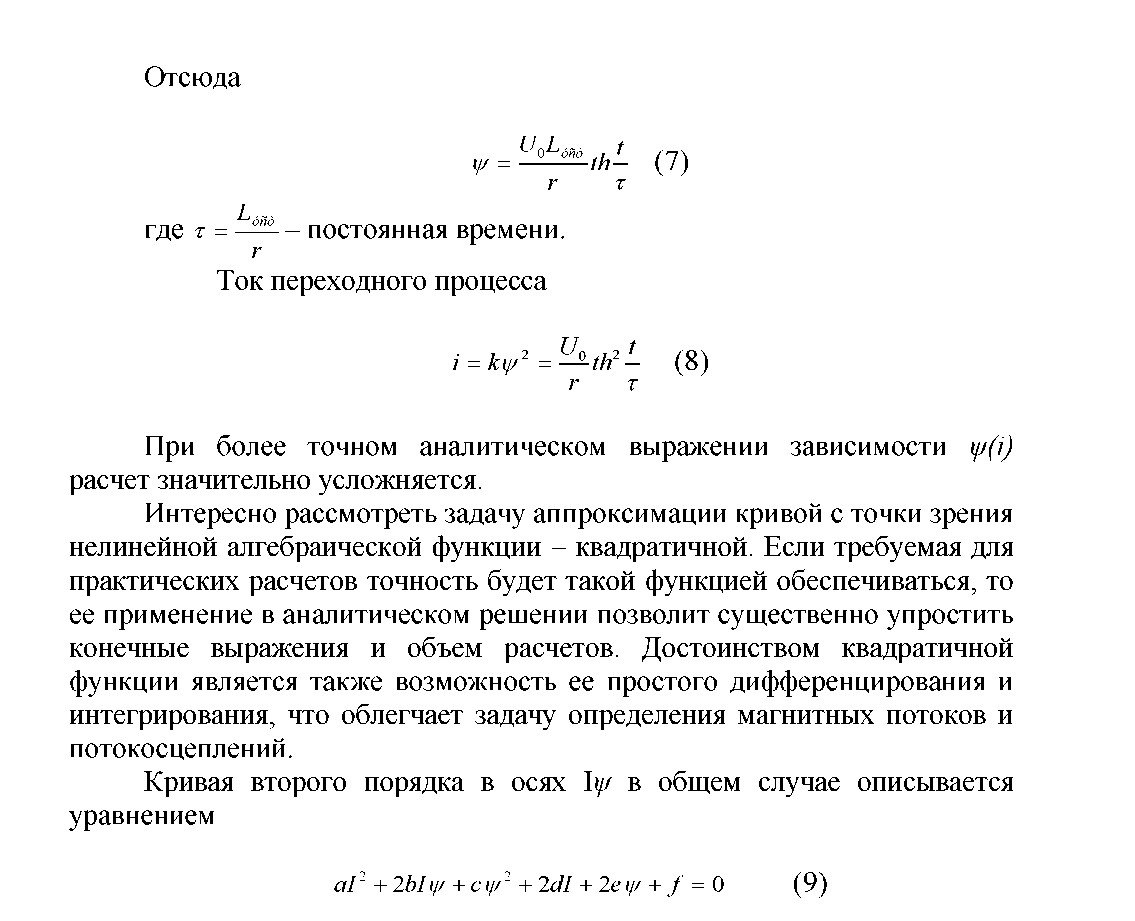
Нелинейная характеристика приближенно может быть выражена некоторой аналитической функцией, которую надо подобрать так, чтобы наиболее просто можно было решить получившиеся дифференциальные уравнения. Успешность решения определяется точностью подбора аналитического выражения и простотой расчета, а эти факторы взаимно исключают друг друга. Поэтому расчет получается либо слишком громоздким, порой невыполнимым, либо таит в себе заведомую погрешность вследствие упрощения аппроксимирующего выражения.
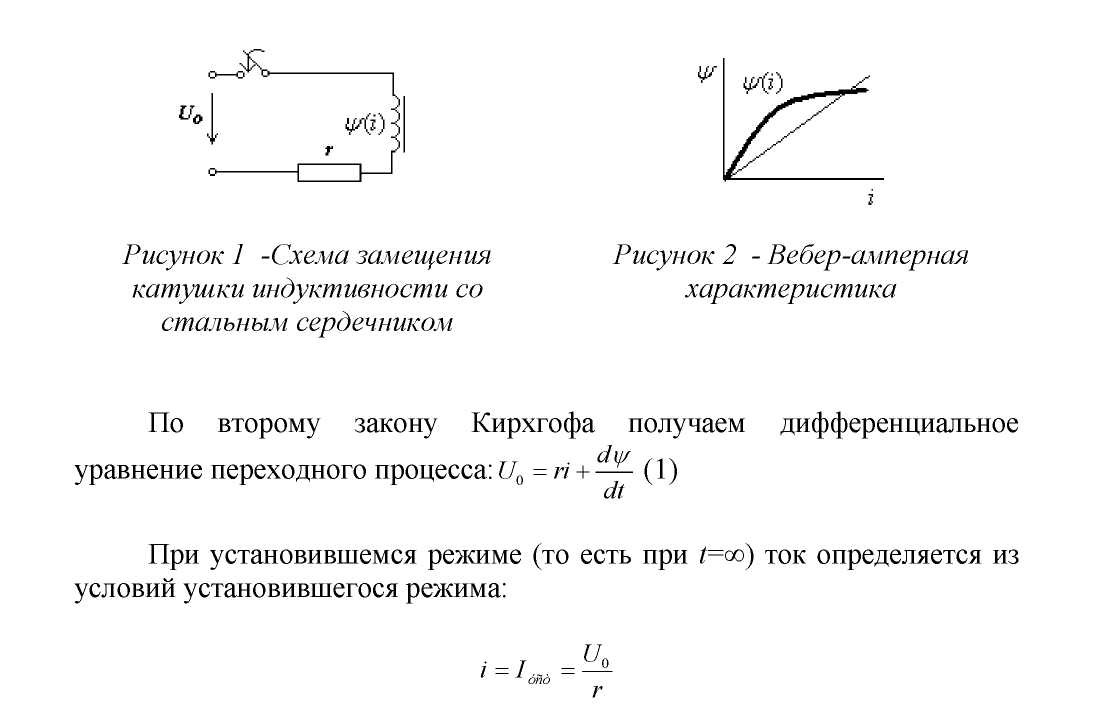
Рассмотрим переходный процесс при включении катушки со стальным сердечником к источнику постоянного напряжения U0 = const, причем представим катушку как последовательное соединение активного сопротивления r и нелинейной индуктивности (рис. 1). Гистерезис и вихревые токи, возникающие при изменении потока, учитывать не будем. Поэтому зависимость ψ(i) задана кривой, приведенной на рис.2.
83
84

Как известно, через пять точек плоскости, три из которых не лежат на одной прямой, можно провести кривую второго порядка. Таким образом на кривой можно подобрать пять точек, через которые должна проходить аппроксимирующая кривая второй степени, так чтобы две точки лежали на начальной прямолинейной части кривой, две на колене кривой и одна – за коленом. При таком расположении точек обеспечивается охват используемой в расчетах кривой, в тоже время любые три точки из выбранных пяти не располагались на одной прямой.
Кроме того, следует ожидать, что из-за достаточно близкого расположения фиксированных точек, принадлежащих реальной кривой, в промежутках между ними аппроксимирующая функция, имеющая плавный характер, несущественно отклонится от реальной кривой и требуемая для инженерных расчетов точность 3-4% будет обеспечиваться.
Для выбранных точек можно написать пять уравнений вида (9), в которых известными являются координаты этих точек ψι,..., ψ5и I1, ..., I5а неизвестными – шесть коэффициентов a, b, c, d, e, f.
Для функции второй степени одновременно не может быть a=0, b=0, c=0, поэтому, деля все пять уравнений на a ( b или c), получим пять уравнений с пятью неизвестными:
85
Полученная функция достаточно удобна для решения различного рода задач, она легко интегрируется и дифференцируется, что очень важно при расчете переходных процессов в нелинейных электрических цепях.
86