Для вычисления таких статистических средних, как размерность, энтропия, спектр показателей Ляпунова, и других характеристик аттрактора, необходимо иметь множество точек, определенных в фазовом пространстве размерности n и принадлежащих аттрактору. Число точек M в расчетах конечно, но обязано быть достаточно большим. Согласно формуле, предложенной в [8]
 (1)
(1)
где D размерность аттрактора. В случае, когда динамическая система задана дискретным оператором отображения, точки находятся автоматически после задания начальных условий. Если динамическая система задана системой дифференциальных уравнений, то в общем случае решение может быть найдено только численным интегрированием системы на компьютере. Обычно используют метод Рунге-Кутта 4го порядка, погрешность задают 10-4-10-8, шаг счета определяется конкретной системой и должен быть выбран в сравнении с наименьшим из ее характерных времен.
Однако часто требуется вычислить характеристики аттрактора некоторой реальной системы, математическая модель которой неизвестна. При этом, как правило, неизвестна и размерность ее фазового пространства. В этой ситуации мы располагаем информацией о поведении во времени какой-либо одной из динамических переменных. К тому же и интервал времени экспериментальной реализации естественно ограничен. Можно ли в таких условиях получить характеристики аттрактора?
Путь к решению этой проблемы был предложен Такенсом. В [10] доказано, что почти для всех гладких динамических систем по имеющейся временной реализации одной наблюдаемой динамической переменной можно сконструировать новый аттрактор, основные свойства которого будут такими же, как у исходного.
Пусть имеется временной ряд экспериментальных данных, представляющий собой отсчеты некоторой физической величины:

 Если известен шаг по времени ,
Если известен шаг по времени ,



 то время .
то время .
Предполагается, что физическая ве-

 личина является одной из переменных динамической системы. Система находится в стационарном режиме, т.е. фазовая траектория проходит внутри аттрактора. Для восстановления аттрактора Такенсом предложен метод временной задержки координат. В n-мерном фазовом пространстве строится последовательность точек вида:
личина является одной из переменных динамической системы. Система находится в стационарном режиме, т.е. фазовая траектория проходит внутри аттрактора. Для восстановления аттрактора Такенсом предложен метод временной задержки координат. В n-мерном фазовом пространстве строится последовательность точек вида:





 Задержка выбирается равной времени первого пересечения нуля автокорреляционной функции. Второй способ [3] требует вычисления спектра мощности временного ряда, т.е. быстрого преобразования Фурье автокорреляционной функции. Если в спектре мощности присутствуют кратные пики, то задержка выбирается равной четверти периода самой высокой
Задержка выбирается равной времени первого пересечения нуля автокорреляционной функции. Второй способ [3] требует вычисления спектра мощности временного ряда, т.е. быстрого преобразования Фурье автокорреляционной функции. Если в спектре мощности присутствуют кратные пики, то задержка выбирается равной четверти периода самой высокой
 здесь временная задержка, размерность вложения.
здесь временная задержка, размерность вложения.
Основной результат Такенса состоит



 в следующем. Если , то множест-
в следующем. Если , то множест-
во точек  задает вложение исходного аттрактора почти при любом выборе наблюдаемой переменной, еслине меньше удвоенной размерности исходного аттрактора. Для оценки характеристик реального исследуемого аттрактора можно вычислять характеристики восстановленного аттрактора. С целью уменьшения ошибки, обусловленной конечностью набора экспери-
задает вложение исходного аттрактора почти при любом выборе наблюдаемой переменной, еслине меньше удвоенной размерности исходного аттрактора. Для оценки характеристик реального исследуемого аттрактора можно вычислять характеристики восстановленного аттрактора. С целью уменьшения ошибки, обусловленной конечностью набора экспери-
ментальных точек , необходимо проводить расчеты при нескольких различных значениях M и добиваться независимости получаемых оценок характеристик
 от M и в пределах заданной точности.
от M и в пределах заданной точности.
Для малых шагов по времени значения  будут близкими, поэтому большое значение приобретает пра-
будут близкими, поэтому большое значение приобретает пра-
 вильный выбор временной задержки .
вильный выбор временной задержки .
Необходимо стремиться выбрать так, чтобы корреляция между  была по возможности минимальной. Традицион-
была по возможности минимальной. Традицион-
ный способ выбора временной задержки состоит в вычислении автокорреляционной функции временного ряда:



(3)
из доминирующих частот. Третий способ
- основан на вычислении средней взаимной информации между двумя измерениями. Пусть даны два множества измерений A и B. Взаимная информация между эле-
 ментом множества A и элементом
ментом множества A и элементом  множества B определяется как количество информации, которое имеют измерения
множества B определяется как количество информации, которое имеют измерения
 и
и  по отношению к друг другу:
по отношению к друг другу:
 Если измерения независимы, то взаимная информация равна нулю. Усредняя
Если измерения независимы, то взаимная информация равна нулю. Усредняя
(4) по всем измерениям, получаем:


 Заменяя и на
Заменяя и на 
 соответственно, получаем среднюю взаимную информацию как функцию временной задержки. Задержка выбирается равной времени первого минимума во взаимной информации.
соответственно, получаем среднюю взаимную информацию как функцию временной задержки. Задержка выбирается равной времени первого минимума во взаимной информации.
В случае модельных данных, когда
нам известна размерность фазового пространства динамической системы и все

(5)
координат каждой точки на аттракторе, корреляционную размерность D2 аттрактора находят следующим образом [5, 7].
Рассмотрим корреляционный интеграл C(r), показывающий относительное число пар точек аттрактора, находящихся на расстоянии, не большем r:




Здесь функция Хевисайда:





 -расстояние в -мерном фазовом пространстве,
-расстояние в -мерном фазовом пространстве,
 число точек
число точек  на аттракторе.
на аттракторе.
 Если выполняется условие
Если выполняется условие
(7)
то D2 считают корреляционной размерностью аттрактора.
Справедливость приведенного степенного закона ограничена значениями, достаточно малыми по сравнению с размером аттрактора. При увеличении r величи-
 на достигает насыщения
на достигает насыщения


 (при сравнимых с размером аттрактора). С другой стороны, при очень
(при сравнимых с размером аттрактора). С другой стороны, при очень
 малых значениях число пар точек
малых значениях число пар точек  ,
,
расстояние между которыми не превышает
 , становится малым (из-за конечности числа точек на аттракторе) и статистика становится бедной. Кроме того, приобрета-
, становится малым (из-за конечности числа точек на аттракторе) и статистика становится бедной. Кроме того, приобрета-
(6)
 ет решающее значение влияние инструментальных ошибок измерения сигнала. Следовательно, на практике степенной закон выполняется только в ограниченном диапа-
ет решающее значение влияние инструментальных ошибок измерения сигнала. Следовательно, на практике степенной закон выполняется только в ограниченном диапа-


 зоне значений (скейлинговом диапазоне), который и может быть использован для определения размерности аттрактора.
зоне значений (скейлинговом диапазоне), который и может быть использован для определения размерности аттрактора.
Учитывая, что из (7) следует
 (8)
(8)
получаем оценку размерности аттрактора как тангенс угла наклона прямой, аппроксимирующей график корреляцион-
 ного интеграла в двойном логарифмическом масштабе.
ного интеграла в двойном логарифмическом масштабе.
В случае экспериментальных данных мы обычно не знаем размерность фазового пространства системы и располагаем информацией только об одной координате точек на аттракторе. Поэтому все расчеты проводятся для нескольких размерностей
фазового пространства =1,2,3,... Для восстановления аттрактора используется метод Такенса. При этом корреляционная

 размерность аттрактора 2 сначала
размерность аттрактора 2 сначала
возрастает, но затем обычно выходит на постоянный  .Таким образом, получают искомую корреляцион-
.Таким образом, получают искомую корреляцион-
ную размерность D2 аттрактора и оценку размерности фазового пространства систе-

 мы
мы  . Если же выходной сигнал динамической системы сильно зашумлен, то размерность аттрактора постоянно
. Если же выходной сигнал динамической системы сильно зашумлен, то размерность аттрактора постоянно
При этом полагают, что
 откуда
откуда
 (10)
(10)
(9)
растет.
Корреляционная энтропия K2 может быть вычислена достаточно просто [6]. Для этого также вычисляют корреляционный интеграл (6), но рассматривают не только
его зависимость от расстояния , но и от размерности фазового пространства .
Энтропия K2 аппроксимируется в приемлемом диапазоне значений и .
 Пусть динамическая система задана дискретным дифференцируемым отображением:
Пусть динамическая система задана дискретным дифференцируемым отображением:




xk+1 = F(xk), , DF(x) матрица Якоби.
Бенеттин [1] придумал численный алгоритм вычисления показателей Ляпунова аттрактора такого отображения. Он начинается с ортонормированного базиса:



 .
.
На k-м шаге вычисляют:

 (11)
(11)
Затем применяют процедуру ортогонализации Грама-Шмида:



 , где , (12)
, где , (12)
На последующих шагах полагают:


 (13)
(13)
где (u,v) обычное скалярное произведение (индексы (k+1) опущены для про-
стоты). Здесь  -длина m-го вектора после ортогонализации, но перед нормализацией.
-длина m-го вектора после ортогонализации, но перед нормализацией.
Показатели Ляпунова численно выражаются как
(14)
 для больших k. Подобный алгоритм применим и к потоку
для больших k. Подобный алгоритм применим и к потоку  , за исключением того, что вариационные уравнения
, за исключением того, что вариационные уравнения


 (15)
(15)
 интегрируют от t до t+ , начиная с ортонормированного базиса
интегрируют от t до t+ , начиная с ортонормированного базиса  в t. Ортонормализационная процедура применяется
в t. Ортонормализационная процедура применяется
как и выше, но множитель 1/k в (13) заме-
 няется на 1/ k.
няется на 1/ k.
Если математическая модель динамической системы неизвестна, то требуются другие алгоритмы нахождения показателей Ляпунова, поскольку в этом случае мы не знаем ни матрицы Якоби, ни размерности фазового пространства системы.
В 1985 году Вольф [12] описал алгоритм нахождения наибольшего показателя Ляпунова по временному ряду данных. Он следит за парой точек на аттракторе для
оценки  на каждом шаге по времени, по которому наибольший показатель Ляпунова может быть вычислен используя (13).
на каждом шаге по времени, по которому наибольший показатель Ляпунова может быть вычислен используя (13).
Схематическая иллюстрация алгоритма приведена на рисунке1. Он начинается с первой точки данных y(t0) и ее ближайшего соседа z0(t0), которые отделены на расстояние r0. Эти две точки эволюционируют во
 времени с шагом пока расстояние r'0
времени с шагом пока расстояние r'0
между ними не превысит некоторую вели-
 чину . Эволюционирующая первая точка данных y(t1) сохраняется, а новый сосед z1(t1) ищется такой, что расстояние
чину . Эволюционирующая первая точка данных y(t1) сохраняется, а новый сосед z1(t1) ищется такой, что расстояние


 (16)
(16)
 снова меньше, чем и такой, что z1(t1) лежит так близко, насколько это возможно в одинаковом направлении, что и направление от y(t1) к z0(t1).
снова меньше, чем и такой, что z1(t1) лежит так близко, насколько это возможно в одинаковом направлении, что и направление от y(t1) к z0(t1).
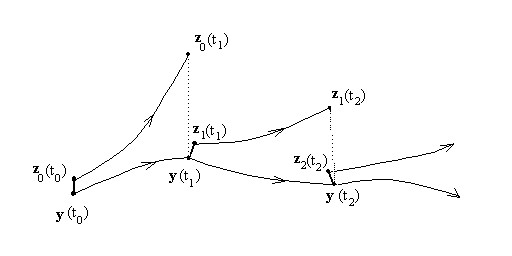
Рис. 1. Схематическая иллюстрация алгоритма
Процедура продолжается до тех пор, пока принятая за основу сравнения траек-
тория  не дойдет до конца временного ряда. Наибольший показатель Ляпунова аттрактора оценивается как
не дойдет до конца временного ряда. Наибольший показатель Ляпунова аттрактора оценивается как


(17)
где L – число шагов замены и m – общее число шагов по времени, в течение которых движется траектория y.
Каждая заменяющая точка должна лежать в том же направлении, что и старая, но из-за ограниченного числа отсчетов
данных необходимы компромиссы. Первоначально поиск точки для замены ограни-


 чен в конусе угловой ширины и высоты около y(t). Обычно устанавливают
чен в конусе угловой ширины и высоты около y(t). Обычно устанавливают
равным  . Значение увеличивают по мере необходимости, пока сосед y не будет найден. Если это не приводит к успеху, то берут ближайшего соседа y безотноситель-
. Значение увеличивают по мере необходимости, пока сосед y не будет найден. Если это не приводит к успеху, то берут ближайшего соседа y безотноситель-
но . Как показано в [12], ориентацион ные ошибки обычно приводят к малым
ошибкам в  . Таким образом, результаты обычно нечувствительны к выбо-
. Таким образом, результаты обычно нечувствительны к выбо-
ру .
Если  не очень маленькое, то алго-
не очень маленькое, то алго-
ритм Вольфа может быть полезен для определения того, хаотичный ли наблюдаемый временной ряд. Часто, однако, интересуются более чем одним первым показателем Ляпунова. Алгоритм может расши-
ряться для измерения 
 , но становится заметно сложнее. Он должен следить за треугольником точек и сохранять ориентацию относительно треугольника, которому выбирают замену. Этот подход становится плохим для более, чем двух положительных показателей Ляпунова.
, но становится заметно сложнее. Он должен следить за треугольником точек и сохранять ориентацию относительно треугольника, которому выбирают замену. Этот подход становится плохим для более, чем двух положительных показателей Ляпунова.
В том же 1985 году Экманн и Рюэль
[2] предложили метод оценки вариационных уравнений (14), который в принципе может дать все показатели Ляпунова аттрактора.
Они следят, по крайней мере, за +1 точкой, по которым методом наименьших квадратов оценивают матрицу Якоби DF(x). Показатели Ляпунова затем можно получить, проинтегрировав вариационные уравнения (14), используя алгоритм Бенеттина. Как показано в [9, 11], основной недостаток такого подхода – в зависимости результатов от размерности вложения аттрактора.
ЛИТЕРАТУРА
- Benettin G., Galgani L., Strelcyn J.M. Kolmogorov entropy and numerical experiments. Phys. Rev.14, 2338-2345 (1976).
- Eckmann J.P., Ruelle D. Ergodic theory of chaos and strange attractors. Rev. Mod. Phys.57, 617-656 (1985).
- Elbert T., Ray W.J., Kowalik Z.J., Skinner J.E., Graf K.E., Birbaumer N. Chaos and physiology: Deterministic chaos in excitable cell assemblies. Phys. Rev.74, (1994).
- Fraser A.M., Swinney H.L. Independent coordinates for strange attractors from mutual information. Phys. Rev. A 33, 11341140 (1986).
- Grassberger P., Procaccia I. Characterization of strange attractors. Phys. Rev. Lett.50, 346-349 (1983).
- Grassberger P., Procaccia I. Estimation of the Kolmogorov entropy from a chaotic signal. Phys. Rev. A 28, 2591-2593 (1983).
- Grassberger P., Procaccia I. Measuring the strangeness of strange attractors. Physica D 9, 189-208 (1983).
- Nerenberg M.A., Essex C. Correlation dimension and systematic geometric effects. Phys.Rev. A 42, 7605 (1986).
- Sano M., Sawada Y. Phys. Rev. Lett.55, 1082 (1985).
- Takens F. Detecting strange attractors in turbulence. In: Dynamical Systems and Turbulence. Lecture Notes in Mathematics, edited by D.A.RandL.S.Young. Heidelberg: Springer-Verlag, 366-381 (1981).
- Vastano J.A., Kostelich E.J. Comparison of algorithms for determining Lyapunov exponents from experimental data. In: Dimension and Entropies in Chaotic Systems, edited by G.Mayer-Kress. Berlin: SpringerVerlag, 100-107 (1986).
- Wolf A., Swift J.B., Swinney H.L., Vastano J.A. Determining Lyapunov exponents from a time series. Physica D 16, 285-317 (1985).