Рассматривается управление мобильными объектами как взаимодействие двух процессов: решения навигационной задачи и решения задачи стабилизации. Моделирование нелинейной системы управления мобильными объектами осуществляется в среде Matlab.
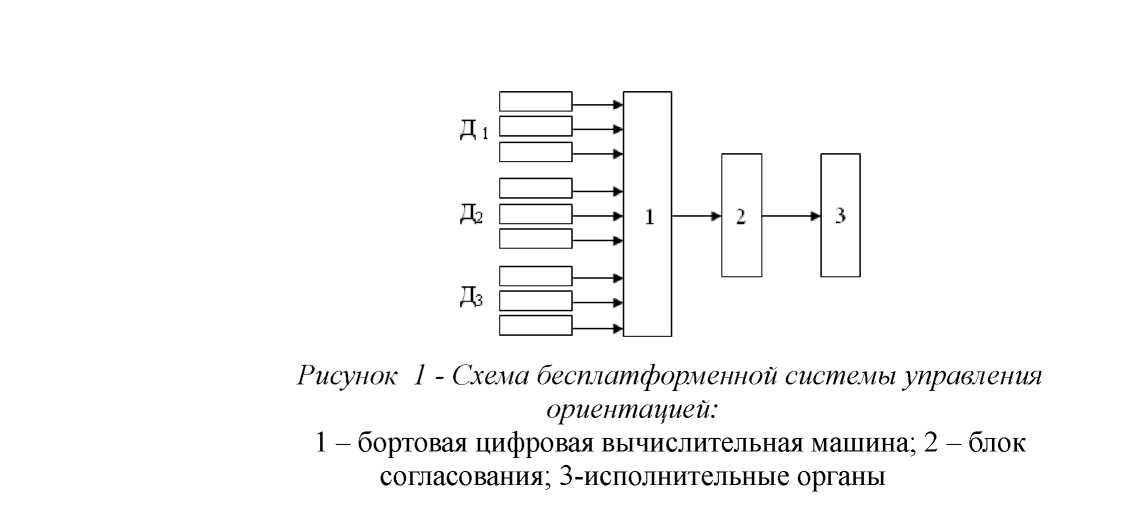
Управление мобильными объектами с помощью любой инерциальной системы может рассматриваться как взаимодействие двух процессов: решения навигационной задачи и решения задачи стабилизации. Рассмотрим эту проблему на примере летательного аппарата, где данные задачи наиболее актуальны в связи с возможностью их автономной работы и высокими скоростями движения. Первая задача заключается в определении требуемой траектории летательного аппарата и в вычислении фактической траектории, вторая — в управлении аппаратом для поддержания требуемого курса с заданной точностью [1]. Так на рис 1. приведена типичная схема бесплатформенной системы управления космическим аппаратом. С бортовой цифровой вычислительной машиной 1 соединены три группы датчиков, условно обозначенных через Д1 , Д2 и Д3.
Вырабатываемые в машине сигналы управления преобразуются должным образом в блоке согласования 2, после чего поступают на исполнительные органы системы ориентации 3. Воздействуя на динамику ракеты (в зависимости от работы исполнительных органов, изменяется его угловое движение, и на входе вычислительной машины появляются измененные сигналы датчиков системы ориентации). На приведенной схеме все датчики условно разбиты на три группы в зависимости от основной задачи, выполняемой ими в полете.
При этом задача системы стабилизации — обеспечить управление рулями и тягой таким образом, чтобы выполнить задаваемую программу полета с требуемой точностью. Ее структурная схема показана на рис. 2.
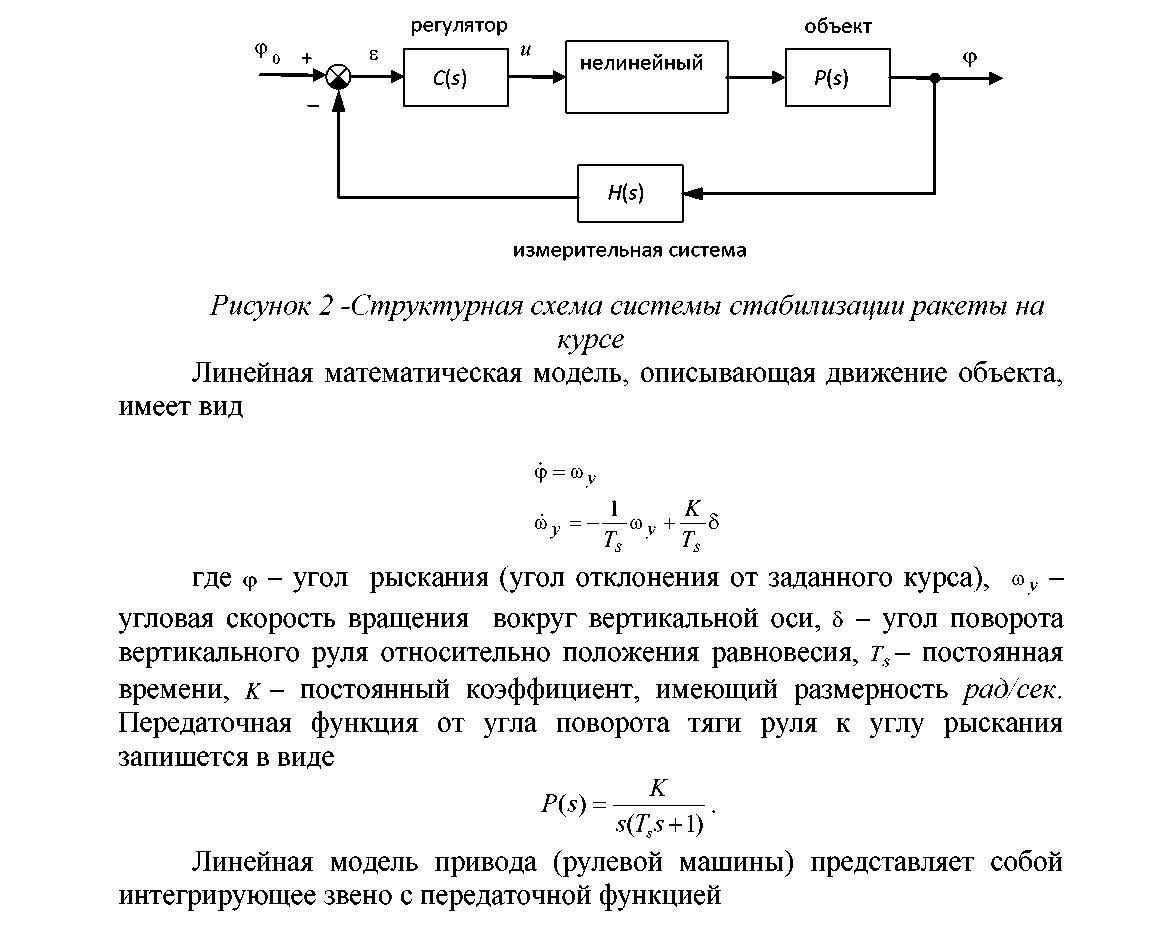
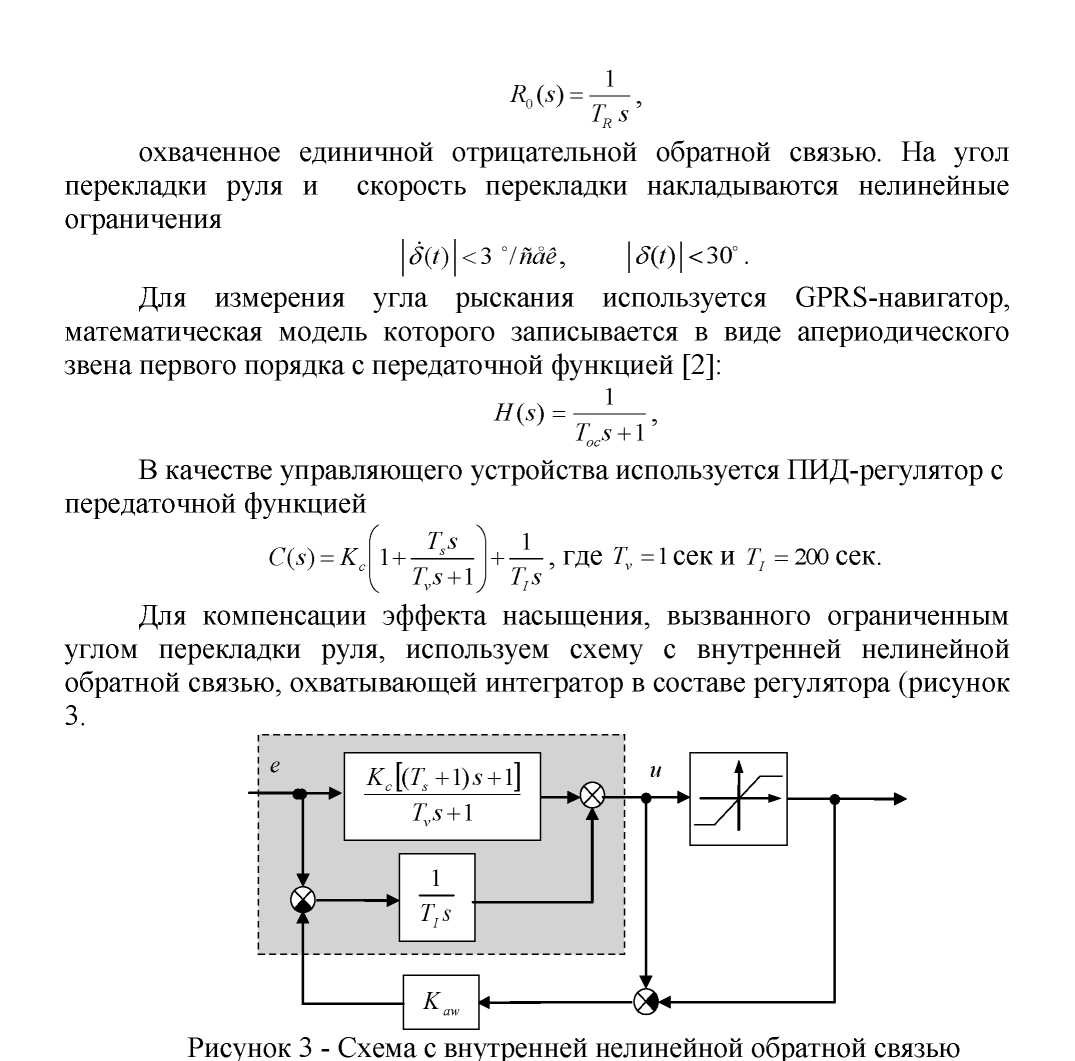
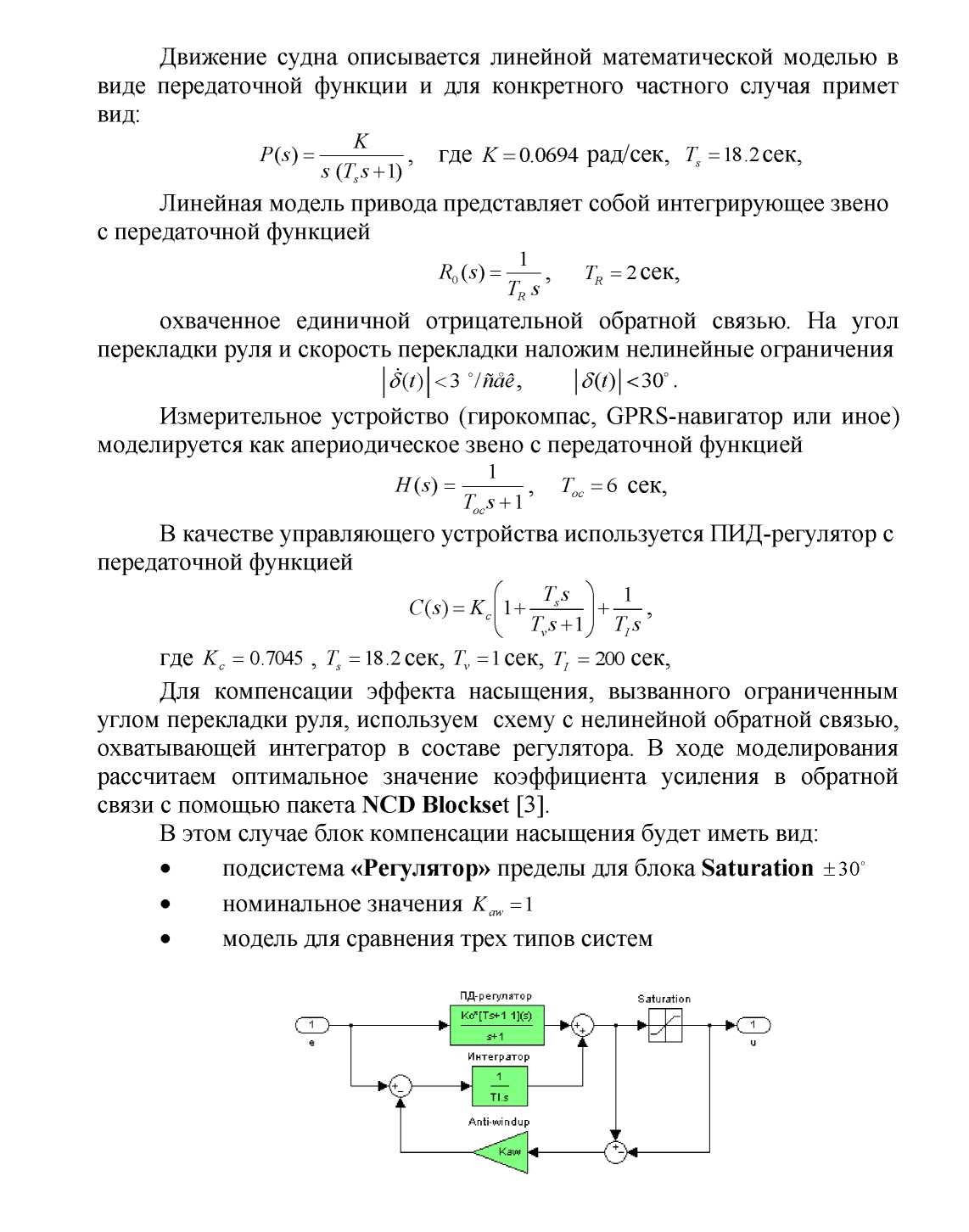
Базовый регулятор, построенный по линейной модели, выделен серым фоном. Сигнал u на его выходе представляет собой желаемый угол перекладки руля. Для блока нелинейной коррекции типа «насыщение» выбираются пределы, равные ограничениям на угол перекладки руля.
Если насыщения нет, разность сигналов u—u равна нулю, и обратная связь не работает; используется закон управления, синтезированный для линейной системы. Если сигнал u превышает допустимые пределы, разность u—u подается (со знаком «минус») на вход интегратора через усилитель. Таким образом, при насыщении сигнал на входе интегратора ослабляется тем сильнее, чем больше разность между желаемым и допустимым углами перекладки. Такой метод коррекции получил в литературе название anti-windup (противодействие «наматыванию»).
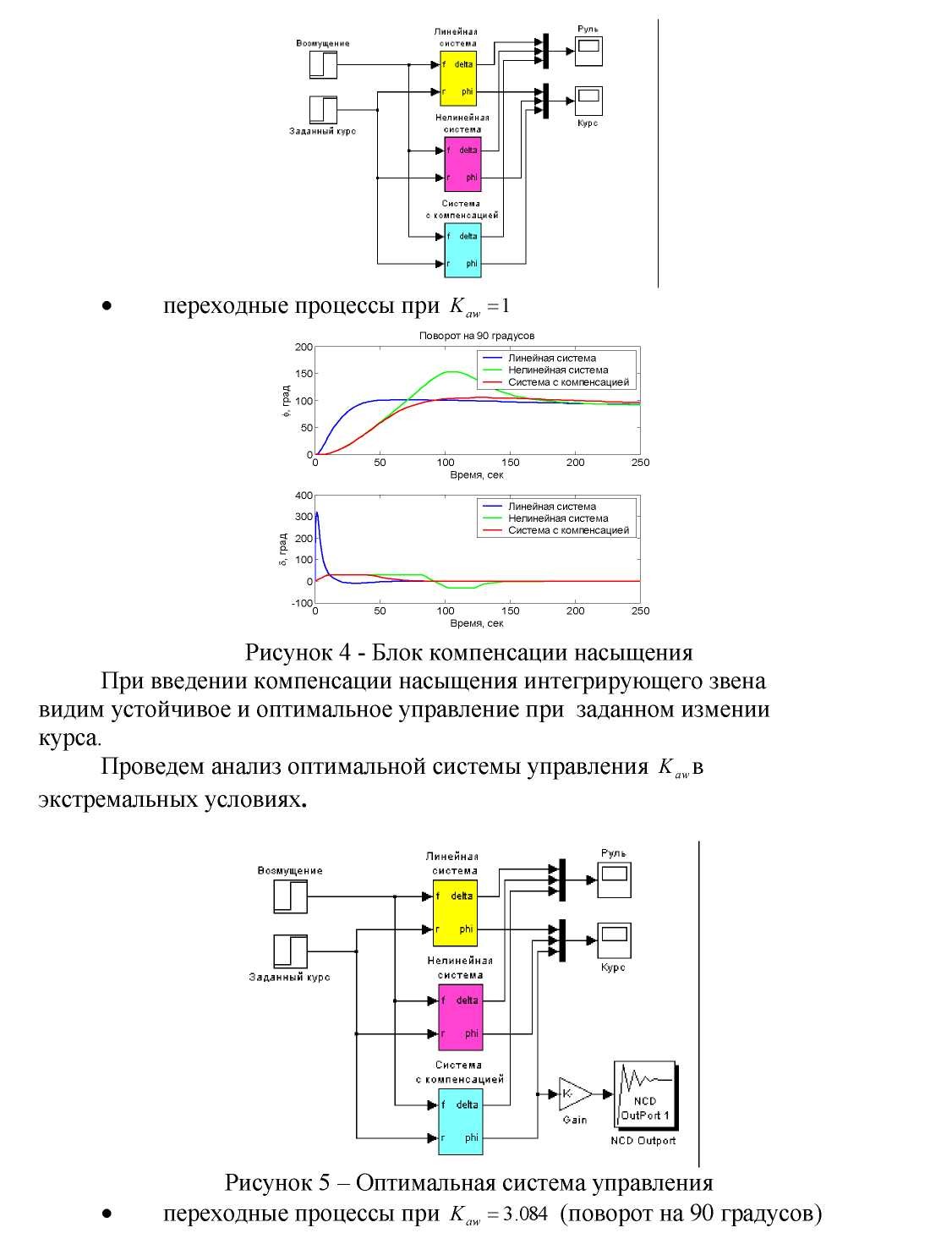
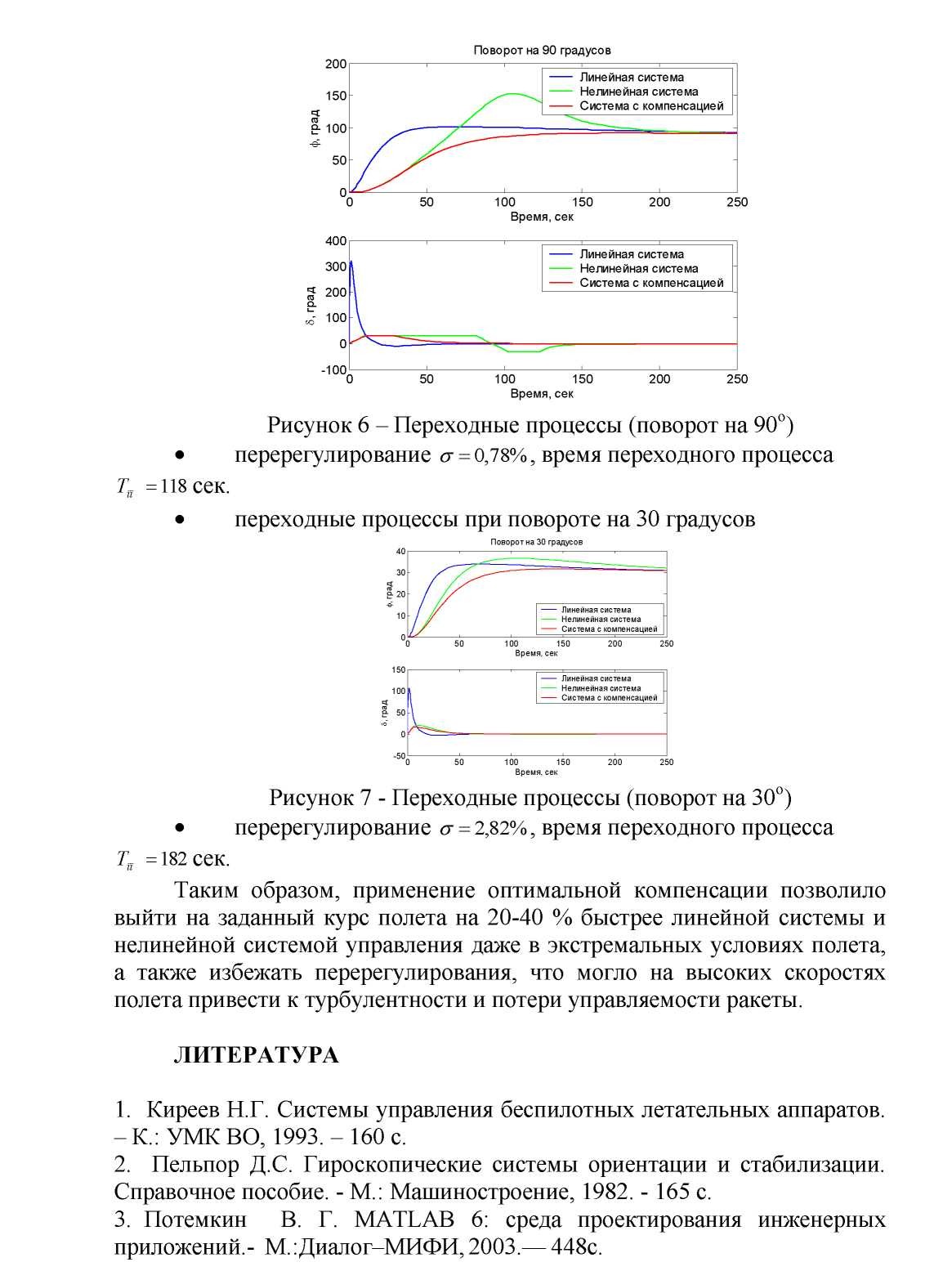
Для выбора оптимального значение коэффициента Kaw использована процедура численной оптимизации пакета NCD Blockset.