Животноводство является основной отраслью сельского хозяйства. От условий содержания и гигиены животных, напрямую зависит их продуктивность. Технологическая операция очистки животноводческих помещений от навоза имеет немаловажное значение. Удаление навоза необходимо производить регулярно и качественно. Для этого требуются эффективные и высокопроизводительные машины.
В комплексной механизации животноводческих ферм важное место, занимает технологический процесс удаления навоза. Совершенствование машин для удаления навоза направлено на повышение производительности и эффективности данного процесса.
Предлагаемая машина относится к устройствам для удаления и выгрузки жидкого, полужидкого навоза и помёта, преимущественно из животноводческих и птицеводческих помещений.
Имеющееся устройство для удаления жидкого и полужидкого навоза, содержащее транспортирующие рабочие органы, размещенные в имеющих треугольную форму, закрытых сверху решётками продольном и поперечном навозных каналах, стенки которых выполнены с чередующимися между собой продольными полосами из антифрикционного материала и бетона, причём рабочий орган выполнен в виде гибкого цилиндрического винта со свободным концом в начале канала, привод которого размещён со стороны выгрузки продукта, при этом полосы из антифрикционного материала установлены вдоль навозных каналов по линиям контакта с рабочим органом, а вал привода пропущен через брызгоотражательный щиток [1].
Такое устройство не обеспечивает высокопроизводительное удаление навоза, так как рабочий орган в виде гибкого цилиндрического винта подвергается неравномерной нагрузке со стороны удаляемого жидкого, полужидкого навоза и помёта. Поскольку параметры навозных каналов и гибких цилиндрических винтов выполнены постоянными по их длине, топо мере продвижения навоза по каналам увеличивается его удельный объём на единицу длины канала. Это приводит к переполнению каналов и выходу навоза за пределы решётки, что увеличивает сопротивление перемещению навоза и энергоёмкость процесса, а также повышает вероятность защемления содержащихся в навозе отдельных твёрдых частиц между рабочим органом в виде гибкого цилиндрического винта и стенками канала. В последнем случае произойдёт отклонение оси гибкого цилиндрического винта от её первоначального положения, многократно увеличенное в силу вращения на его свободном конце. Это приведёт к биениям свободных концов гибких цилиндрических винтов о решётку и окажет сильное стрессовое воздействие на животных, снижая их продуктивность и способствуя заболеваемости.
Возникает задача, которая заключается в повышении производительности удаления жидкого, полужидкого навоза и помёта при одновременном снижении энергоёмкости и стрессового воздействия на животных.
Данная задача решается с помощью устройства для удаления жидкого и полужидкого навоза, содержащего транспортирующие рабочие органы, размещенные в имеющих треугольную форму, закрытых сверху решётками продольном и поперечном навозных каналах, стенки которых выполнены с чередующимися между собой продольными полосами из антифрикционного материала и бетона, причём рабочий орган выполнен в виде гибкого цилиндрического винта, привод которого размещён со стороны выгрузки продукта, при этом полосы из антифрикционного материала установлены вдоль навозных каналов по линиям контакта с рабочим органом, а вал привода пропущен через брызгоотражательный щиток, где рабочий орган выполнен в виде гибкого цилиндрического винта, представляющего собой однозаходную цилиндрическую пружину сжатия с уменьшающимся шагом и диаметром сечения прутка в направлении привода.
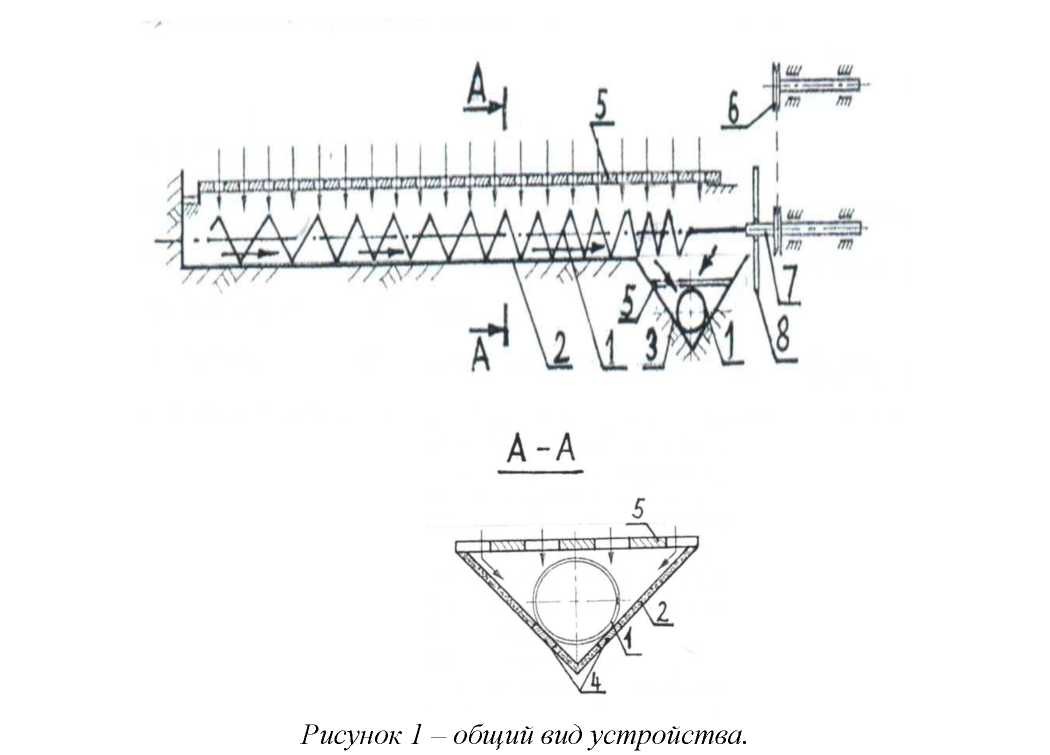
На рисунке 1 изображен общий вид устройства и поперечное сечение навозного канала.
Устройство для удаления жидкого и полужидкого навоза из животноводческих помещений содержит транспортирующие рабочие органы 1, размещённые в продольном 2 и поперечном 3 навозных каналах, стенки которых выполнены с чередующимися между собой продольными полосами из антифрикционного материала 4 и бетона. Навозные каналы 2 и 3 имеют в поперечном сечении треугольную форму и закрыты сверху решётками 5. Рабочий орган 1 выполнен в виде гибкого цилиндрического винта, представляющего собой однозаходную цилиндрическую пружину сжатия с уменьшающимися шагом и диаметром сечения прутка в направлении привода 6, который размещён со стороны выгрузки продукта, при этом полосы из антифрикционного материала 4 установлены вдоль навозных каналов 2 и 3 по линиям контакта с рабочим органом 1, а вал привода 7 пропущен через брызгоотражательный щиток 8.
Устройство работает следующим образом.
Жидкий и полужидкий навоз через решётки 5 попадает в навозный канал 2, где захватывается рабочим органом 1 и перемещается в поперечный навозный канал 3. При этом по мере продвижения навоза к выходу из канала, интенсивность воздействия на рабочий орган 1 в виде гибкого цилиндрического винта постоянно увеличивается за счёт уменьшающегося шага винта в направлении привода 6. Это устраняет возможность переполнения навозного канала, повышает производительность, снижает энергоёмкость процесса удаления навоза, уменьшает вероятность защемления содержащихся в нём отдельных твёрдых частиц между рабочим органом в виде гибкого цилиндрического винта и стенками канала. Уменьшающаяся при этом продолжительность включения устройства и отсутствие биения свободных концов гибких цилиндрических винтов о решётку, в том числе за счёт более сбалансированного распределения массы цилиндрического винта по его длине вследствие уменьшения диаметра прутка цилиндрического винта в направлении привода, снизит стрессовое воздействие на животных, увеличивая их продуктивность и снижая заболеваемость. Затем рабочим органом 1 навоз по поперечному каналу 3 удаляется из помещения. Для нормального протекания процесса удаления навоза вначале включают рабочий орган, находящийся в поперечном канале 3, и только после этого рабочие органы, находящиеся в поперечных каналах 2.
ЛИТЕРАТУРА
- Патент на изобретение Российской Федерации №2210887 C2, МПК А 01К 1/06. Бюл. №24, 2003.