В данной статье мы рассматриваем адаптивные и нечеткие методы для контроля за светофором для одного перекрестка. Мы предлагаем метод проектирования для нечеткой системы управления.
Введение
Современный город невозможно представить без автотранспорта, как общественного, так и личного. Обеспеченность жителей населенного пункта транспортными средствами определяет показатель, называемый уровнем автомобилизации. Этот показатель определяется как количество автомобилей, приходящихся на 1000 человек.
Рост уровня автомобилизации приводит к увеличению интенсивности движения в городах, что вызывает обострение транспортных проблем. Особенно остро они проявляются в узлах улично-дорожной сети (УДС) - перекрестках. Здесь увеличиваются задержки в движении транспорта, возникают заторы (пробки), что вызывает бесполезный расход топлива, а также повышенный износ узлов и агрегатов. С точки зрения экологиипеременный режим движения, частые остановки и скопление автомобилей на перекрестках являются причинами повышенного загрязнения воздуха, а это, в свою очередь, негативно сказывается на здоровье горожан. Рост интенсивности транспортных потоков отрицательно сказывается и на безопасности дорожного движения.
По состоянию на июль 2009 года в Екатеринбурге насчитывается около 525 тысяч автомобилей [1]. При этом общая протяженность УДС составляет 1327,2 км [2]. В связи с высокой автомобилизацией, а также ввиду исторически сложившейся планировочной структуры города Екатеринбурга, характеризующейся высокой плотностью застройки, высокой концентрацией мест приложения труда в центральной части города и удаленностью от них крупных жилых массивов, в Екатеринбурге наблюдается чрезмерная загруженность городской транспортной системы.
Специалистами различных государственных, муниципальных и частных организаций постоянно предлагаются различные меры, направленные на решение данной проблемы. Традиционно решения носят архитектурнопланировочный или организационный характер: расширяются существующие и строятся новые дороги и развязки, создаются дополнительные полосы для движения общественного транспорта, организуется одностороннее или реверсивное движение, ограничивается движение определенных видов транспорта на отдельных участках УДС.
Однако в настоящее время экстенсивные методы решения проблемы постепенно себя изживают, так как место для строительства новых дорог в черте города ограниченно, а организационные методы зачастую вносят сложности и снижают эффективность использования улично-дорожной сети, увеличивая общее время нахождения автотранспортных средств в пути. На смену им приходят методы интенсификации использования улично-дорожной сети, методы оптимизации управления на перекрестках. Ведь зачастую чрезмерная загрузка перекрестков вызывается их нерациональным использованием. Параметры цикла светофорного регулирования, как правило, имеют фиксированное значение, которое может меняться в течение дня в соответствии с предустановленной программой, определяемой заранее на основании транспортных исследований. Однако случайные колебания интенсивностей транспортных потоков в течение дня, не учитываемые при такой схеме управления, приводят к ситуации, когда одни направления на подъезде к перекрестку оказываются недогруженными, а на других образуются заторы.
Опыт зарубежных городов показывает, что одной из наиболее эффективных мер по устранению проблем транспортной сети города на сегодняшний день является создание автоматизированных систем управления дорожным движением (АСУ ДД). АСУ ДД – это комплекс технических, программных и организационных мер, обеспечивающих сбор и обработку информации о параметрах транспортных потоков и на основе этого оптимизирующих управление движением. Управление движением вАСУ ДД организовано по иерархическому принципу и осуществляется на трех уровнях управления: стратегическом (район, город), тактическом (магистраль, маршрут) и локальном (один или группа перекрестков).
В терминологии систем управления дорожным движением выделяют интеллектуальные АСУ ДД, отличающиеся тем, что сбор информации о транспортных потоках в них осуществляется детекторами транспорта. На основании полученной от транспортных потоков обратной связи изменяются параметры светофорного регулирования, т.е. выполняется гибкое или адаптивное управление. Таким образом, в строгой терминологии теории управления такие системы правильнее было бы назвать адаптивными, так как интеллектуальные системы управления – это системы, в которых применяются интеллектуальные методы сбора и обработки информации (нечеткая логика, генетические алгоритмы, искусственные нейронные сети и другие методы).
Вариантом решения задачи управления движением на отдельном перекрестке может служить локальная адаптивная система автоматического управления светофорной сигнализацией. Такая система позволяет, путем оперативного изменения параметров светофорного регулирования, снизить время ожидания для транспортных средств и, следовательно, повысить пропускную способность отдельно взятого перекрестка. Оптимизация светофорной сигнализации на отдельно взятом перекрестке – первый шаг на пути минимизации транспортных задержек на УДС города средствами многоуровневого управления транспортными потоками на различных ее участках.
Применение классических методов адаптивного управления светофорным объектом
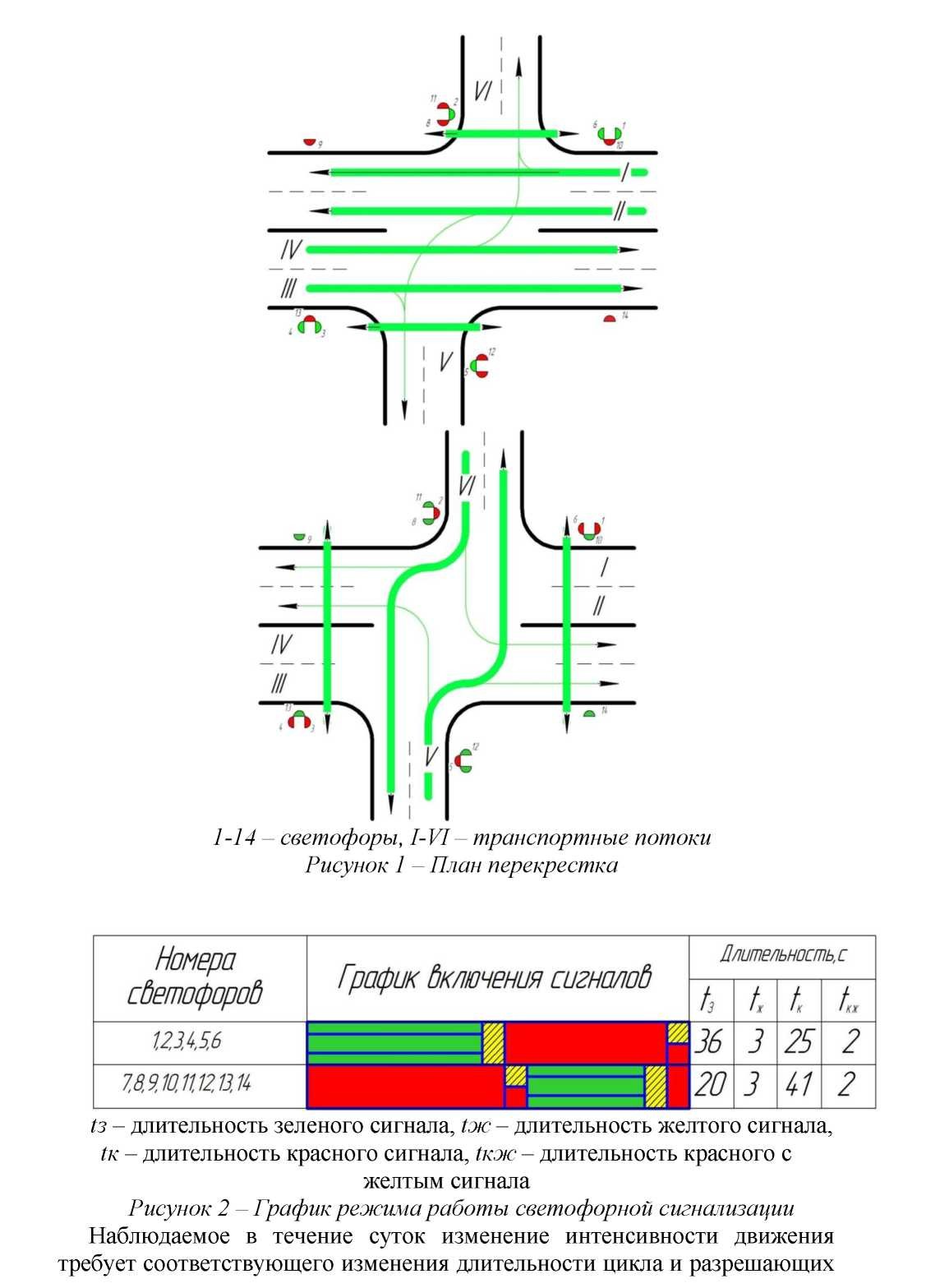
Применение такой системы можно рассмотреть на примере светофорного объекта на пересечении улиц Одинарка и Готвальда города Екатеринбурга. Движение на перекрестке организовано в две фазы с пропуском: в первой фазе по улице Готвальда транспортных потоков во всех направлениях и пешеходов, во второй фазе – то же по улице Одинарка. Для создания системы примем существующую схему расстановки технических средств регулирования дорожного движения (ТСР).
На рисунке 1 представлен план перекрестка, на котором указаны номера транспортных потоков, расположение и номера светофоров, пропускаемые в каждой из фаз транспортные и пешеходные потоки.
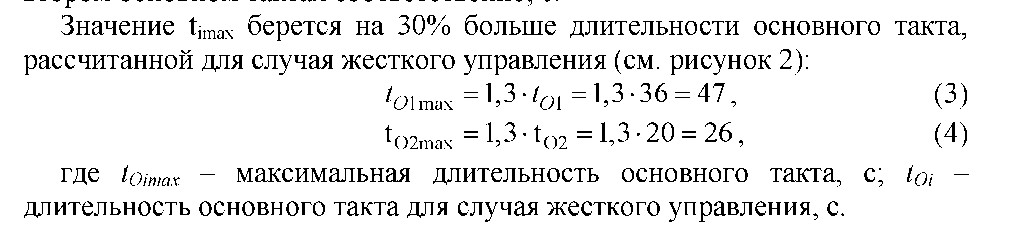
На рисунке 2 приведена временная диаграмма цикла регулирования при жестко фиксированных параметрах светофорного цикла, построенная на основании расчетов, проведенных исходя из параметров перекрестка и транспортных потоков. Расчеты проводились по методике, изложенной в [3].
сигналов. Учет случайных колебаний параметров движения транспорта возможен при использовании адаптивного управления, имеющего обратную связь по параметрам транспортных потоков. Автоматически она может осуществляться специальными устройствами сбора информации - детекторами транспорта (ДТ). По результатам ее обработки дорожный контроллер определяет режим работы светофорной сигнализации.
Существует несколько видов алгоритмов адаптивного управления [3]. В данной статье рассматривается наиболее распространенный - алгоритм поиска разрыва в транспортном потоке в направлении действия разрешающего сигнала при фиксированных значениях управляющих параметров (время, определяющее разрыв в потоке, минимальная и максимальная длительности разрешающего сигнала). При использовании данного алгоритма сигнал переключается с разрешающего на запрещающий при обнаружении временного интервала между прибывающими к перекрестку автомобилями, большего или равного заданному. В противном случае длительность разрешающего сигнала продлевается на длительность заданного интервала.
Основными параметрами управления, используемыми в рамках данного алгоритма, являются: минимальная длительность основного такта tomin, максимальная длительность основного такта tomax; экипажное время (интервал, задающий разрыв в потоке, определяющий необходимость продления разрешающего сигнала) řэк.

где t0imin - минимальная длительность основного такта, c; Ionilli - время, необходимое пешеходам для пересечения проезжей части в первом и втором основном тактах соответственно, с.
Время ţэк обычно находится в пределах 4-5 с, в зависимости от расстояния, на котором установлен детектор, и скорости транспортных потоков.
Алгоритм поиска разрывов в потоке по сравнению с жестким управлением обеспечивает снижение задержки на 10-60%. Это во многом определяется загрузкой перекрестка. Высокая эффективность алгоритма достигается за счет снижения числа ненасыщенных направлений движения.
В перспективе данный алгоритм может быть применен на совокупности близлежащих светофорных объектов с последующим их включением вАСУ ДД города, что позволит начать оптимизацию светофорного регулирования с отдельных участков УДС.
Адаптивное управление благодаря более эффективному использованию городской улично-дорожной сети позволяет снизить задержки и количество остановок перед перекрестком, что влечет за собой сокращение вредных выбросов в атмосферу. Это также приводит к уменьшению накопления усталости водителями, что благоприятно сказывается на безопасности дорожного движения.
Использование элементов искусственного интеллекта в управлении дорожным движением
С развитием технологий искусственного интеллекта (ИИ) расширяется область их применения. Сегодня методы ИИ применяется в различных системах и устройствах, от бытовой техники до космической отрасли. Ведутся также и разработки по внедрению искусственного интеллекта в системы моделирования транспортных потоков и управления дорожным движением.
Авторами рассматривается задача оптимизации работы светофорного объекта с целью минимизации количества автомобилей, ожидающих проезда через перекресток. Для управления светофорами предлагается применить нечеткий регулятор, использующий систему нечеткого вывода типа Мамдани. Построение нечеткой модели основывается на представлении характеристик системы в терминах лингвистических переменных, в качестве которых рассматриваются входные и выходные переменные процесса управления. Процесс нечеткого вывода представляет собой процедуру получения нечетких заключений на основе нечетких условий-предпосылок.
Построение системы интеллектуального управления по этой технологии предполагает выполнение следующих этапов [4, 5]:
- определение входов и выходов создаваемой системы управления;
- фаззификация (приведение к нечеткости) - задание для каждой из входных и выходных переменных функций принадлежности;
- формирование базы правил системы нечеткого вывода;
- агрегирование подусловий в нечетких правилах продукций - определение степени истинности условий по каждому из правил системы нечеткого вывода;
- активация подзаключений в нечетких правилах продукций - нахождение степени истинности каждого из подзаключений правил нечетких продукций;
- аккумулирование заключений нечетких правил продукций - нахождение функции принадлежности для каждой из выходных лингвистических переменных;
- деффазификация выходных переменных - получение для каждой из выходных лингвистических переменных обычного (не нечеткого) количественного значения, пригодного для использования внешними устройствами;
- проверка работы системы.
В качестве входных параметров системы управления могут рассматриваться различные варианты характеристик транспортных потоков на подходах к перекрестку: длина очереди, транспортные задержки, средняя пространственная скорость потока за заданный период времени и т.д., а также их комбинации, что определяется используемыми в конкретной ситуации детекторами транспорта. Выходными переменными процесса управления выступают длительности фаз и цикла регулирования.
Каждому входному и выходному параметру процесса управления присваивается степень принадлежности некоторой лингвистической переменной. На рисунке 3 представлен возможный вариант фаззификации входного параметра «скорость движения потока», представленный в окне расширения Fuzzy Logic Toolbox среды программирования MATLAB.
На следующем этапе строится база правил для установления связей между входными и выходными лингвистическими переменными. Для построения базы правил используется комбинированный метод, включающий экспертные знания и интеллектуальную систему извлечения знаний, основанную на генетических алгоритмах [6]. Использование такой системы позволяет построить внутренне непротиворечивую и логически полную базу знаний для любого количества входных и выходных переменных.
Решение аналогичной задачи в простой постановке, включающей пересечение двух дорог с одной полосой в каждом направлении движения было предложено в [7]. В более сложном случае, например, при наличии нескольких полос движения в одном или в нескольких направлениях, число входных переменных возрастает, что вызывает существенные сложности при построении базы правил стандартными методами.
Использование классических алгоритмов адаптивного управления требует наличия большого числа детекторов транспорта для получения точной информации о параметрах транспортных потоков. Применение элементов искусственного интеллекта, в частности, нечеткой логики, в управлении дорожным движением позволяет уменьшить требуемое

количество детекторов транспорта, так как такая система способна работать с неточной и нечеткой информацией о транспортных потоках, получая данные с соседних перекрестков. Такая система позволяет оптимизировать параметры светофорного регулирования, предлагая более эффективное решение, уменьшая при этом стоимость и затраты на эксплуатацию за счет уменьшения числа элементов (детекторов транспорта).
ЛИТЕРАТУРА
- Краткая справка по городу Екатеринбург // Федеральная база данные ГАИ (ГИБДД) Екатеринбурга и Свердловской области онлайн. URL: http://www.gibdd-ekaterinburg.ru/ek_short.html (дата обращения: 03.10.2012).
- Общая протяженность автомобильных дорог в Екатеринбурге превышает 1327 километров // Insider news. URL: http://insidernews.ru/49559 (дата обращения: 03.10.2012).
- Кременец Ю.А., Печерский М.П., Афанасьев М.Б. – Технические средства организации дорожного движения: Учеб. для вузов. – М.: ИКЦ «Академкнига», 2005. – 279 с.
- Леоненков А.В. Нечеткое моделирование в среде MATLAB и fllzzyTECH : СПб: БХВПетербург, 2005. - 736 с.
- В. Дьяконов, В. Круглов. Математические пакеты расширения MATLAB. Специальный справочник. – Санкт-Петербург: Питер, 2001 – 480 с.
- Тарасян В.С. Построение системы нечеткого управления при помощи генетических алгоритмов. // Транспорт XXI века: Исследования, инновации, инфраструктура: Материалы научн.-техн. конф., посв. 55- летию УрГУПС. – Екатеринбург: УрГУПС, 2011. – Вып. 97(180). Т. 2. – С. 621-626.
- Вовк О.Л., Федяев О.И. Исследование алгоритмов нечёткого вывода в системах управления трудноформализуемыми объектами. // Сборник трудов магистрантов Донецкого национального технического университета. – Донецк. ДонНТУ Министерства образования и науки Украины, 2002. – Вып. 1. – С. 895-903.