Аннотация
Статья посвящена одной из разновидностей роботов компании «Robotis», а именно роботу Darwin Mini. В статье дан обзор специального приложения для смартфона «RobotisMini» и кратко описаны комплектующие и основные характеристики робота DarwinMini, его преимущества и недостатки, контроль и управление роботом. Дан анализ проблемы, характерный для большинства роботов фирмы «Robotis». Рассматривается проблема восстановления настроек, которые «затираются» при создании программ для робота в среде «R+ motion» и найден путь устранения вышеназванной проблемы через обзор программного обеспечения «R+ motion» и изучение интерфейса программы. Решение проблемы было затруднено отсутствием информации об этом в интернете. Проблема решена путем подключения робота через Bluetooth соединение к компьютеру и установки основных параметров использования в программном обеспечении «R+ motion». Описан подробный процесс переноса стандартных настроек из программного обеспечения в микроконтроллер робота. Статья будет полезна преподавателям учебных заведений, ведущим дисциплину, связанным с робототехникой, а также для всех пользователей роботов данной компании, что позволит им сэкономить достаточное количество времени при его использовании.
Еще некоторое время назад в нашей стране с робототехникой непосредственно «вживую» можно было столкнуться лишь на производстве, где использовались какие-либо системы числового программного управления (СЧПУ). Сегодня же интерес к вопросам робототехники наблюдается уже и в образовании: в учебные программы среднего и высшего образования включаются дисциплины, связанные с робототехникой, повсеместно открываются клубы робототехники.
В большинстве учебных заведений в учебном процессе используются такие робототехнические комплексы, как LegoMincIstorms, Arduino, иногда гуманоидные роботы (Robotis, NAO и др.).
В данной статье рассмотрены проблемы, возникающие при использовании гуманоидного робота фирмы RobotisDarwinMini и их разрешение.
Робот состоит из новых высокоэффективных моторов Dynamimel XL, контроллера ОрепСМ9.04-с и пластиковых деталей на основе OLLO.

Управление роботом может осуществляться при помощи смартфона, планшета или компьютера через Bluetooth [1]. Для управления со смартфона разработано специальное приложение «RobotisMini», в которое заложены основные движения робота. А при помощи компьютерной программы «R+ motion» можно реализовывать свои программы (нестандартные движения робота), которые затем загружаются в контроллер робота через Bluetooth-соединение.
Проблема, рассмотренная в статье, - некорректное выполнение стандартных движений (по умолчанию) после загрузки движений, созданных при помощи программы R+ motion. Другими словами, при использовании своих программ (нестандартных движений, созданных в R+ motion), стандартные действия робота затираются, либо меняются в хаотичном порядке.
Поиск информации в интернете по решению названной проблемы на официальном сайте KOMnaHnnRobotis и других англоязычных сайтах и форумах не дал результатов. Для решения этой проблемы, в первую очередь, было решено сбросить настройки на стандартные в приложении «RobotisMini» (на смартфоне) следующим образом:
- Запустить приложение;
- Перейти в раздел «Setting» (Настройки);
- Перейти в подраздел «MotionFileSettings» (Файл стандартных настроек);
- В диалоговом окне выбрать файл «default.mtnx».
Несмотря на это, вместо стандартных команд продолжали выполняться действия, созданные в R+ motion.
Следующим шагом было решение сброса и перезагрузки настроек контроллера ОрепСМ9.04-с с помощью кнопки сброса, находящейся на плате контроллера. Выполнение данного шага отняло достаточно большое количество времени в связи с тем, что добраться до платы контроллера можно только, разобрав верхнюю часть робота.
К сожаленью, и этот шаг не дал результатов, робот продолжал выполнять хаотичные движения.
Поиск информации пришлось продолжить на официальном сайте, где об этой проблеме ничего не было сказано. Не получив аппаратного решения проблемы, перешли к изучению интерфейса программы «R+ motion».
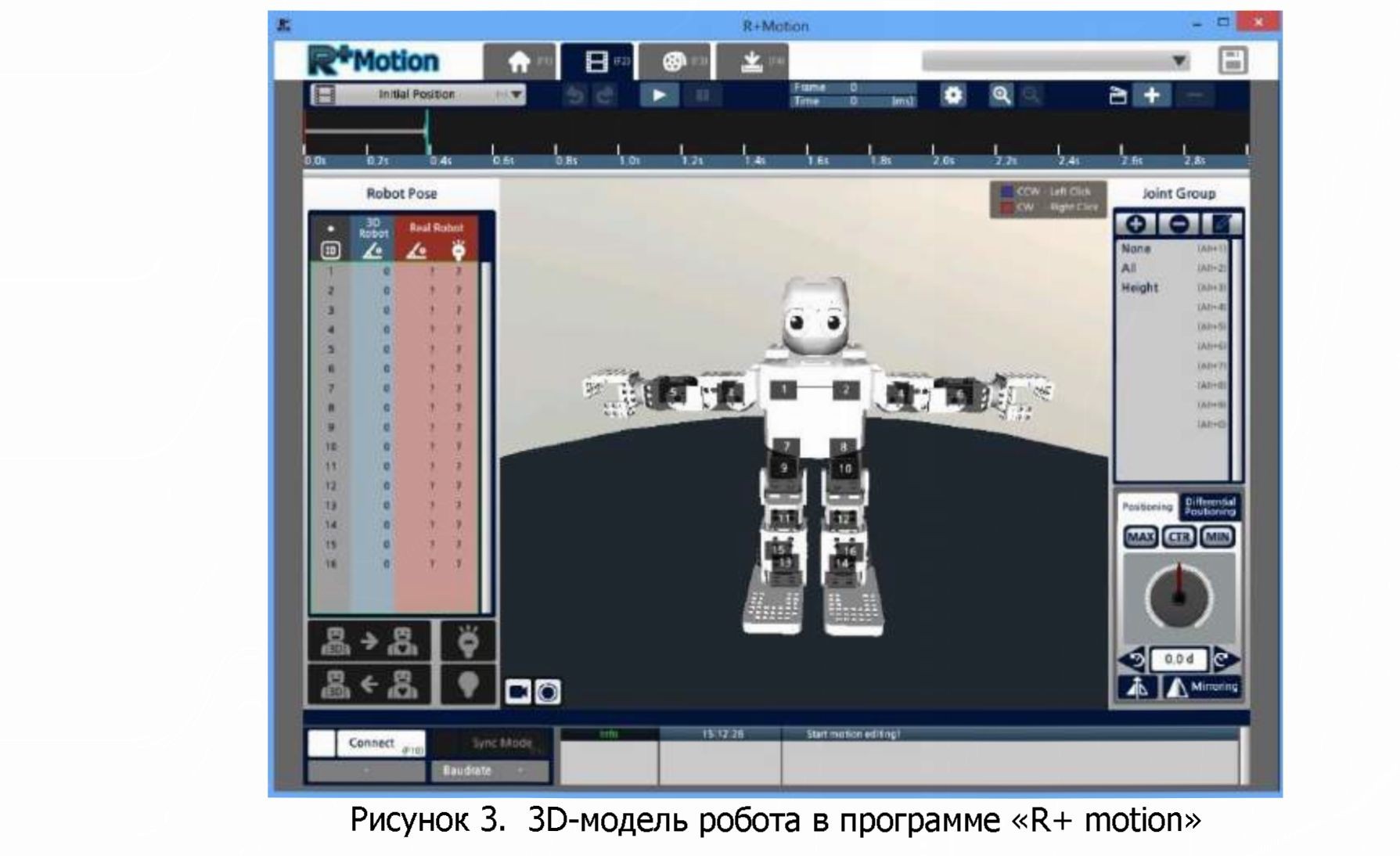
При выборе продукта т.е. DarwinMini, в диалоговом окне появился выбор образца стандартных настроек на нескольких языках и пустой образец. Выбрав пункт «RobotisMiniDefault (eng)», открылось окно с 30-моделью DarwinMini, с возможностью создания, редактирования его точных движений. Созданные в программе «R+ motion» движения робота можно воспроизводить при помощи имеющейся ЗО-модели и по окончании программирования всех необходимых движений загружать их из программы на компьютере в микроконтроллер робота.

 82
82
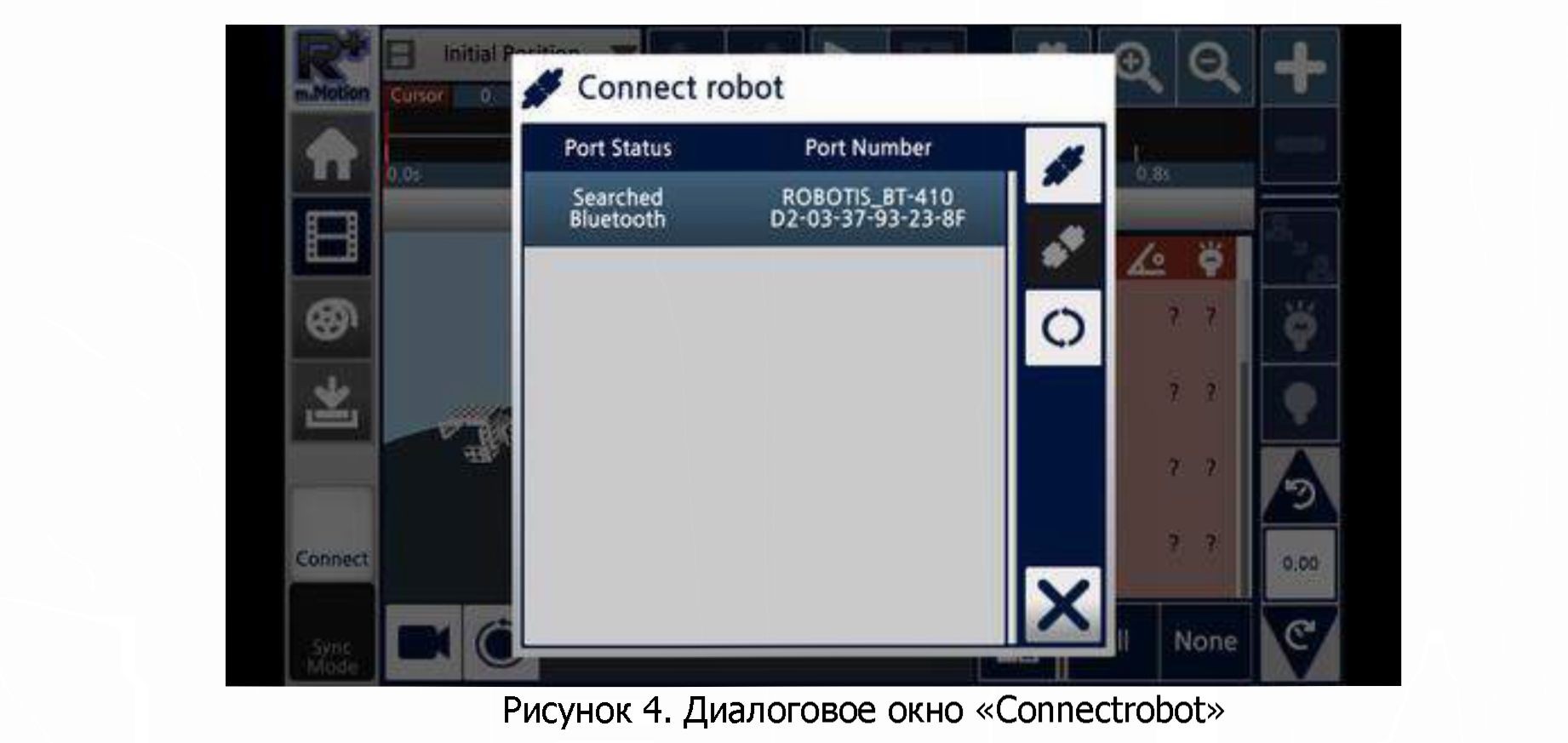
Как было уже сказано, подключение робота осуществляется через Bluetooth- соединение. При поиске активных устройств робот должен быть включен. При запросе соединения необходимо ввести стандартный пароль подключения «0000». После ввода пароля в программе необходимо нажать на кнопку «Connect» или клавишу F10. Откроется диалоговое окно «Connectrobot» (Подключение робота) в котором имеются такие 4 кнопки:
«Auto Connect» (Автоподключение);
«Connect» (Подключение);
«Disconnect» (Отключение);
«Refresh» (Обновить).
При корректном соединении на экране будет отображен тип и номер порта. Выбираем порт и нажимаем кнопку «Connect» (Подключение).
После подключения необходимо перейти во вкладку «Down load Motion» (Загрузить движение) и нажать на кнопку «DownloadMotionGroup* (Загрузить группу движений), загрузка занимает всего несколько секунд. В результате будет восстановлены все стандартные настройки робота и теперь можно использовать смартфон для показа стандартных движений робота.
Следует заметить, что при каждой загрузке своих (нестандартных) движений стандартные настройки будут сбиваться и в этом случае необходимо будет выполнять выше перечисленные шаги, что, конечно, является минусом робота DarwinMini, а также роботов фирмы Robotis.
Нонесмотря на это, робот DarwinMini при наличии дополнительных сенсоров [2] открывает широкий спектр разнообразных задач для пользователей этих роботов. Вближайшем будущем кафедра планирует приобрести сенсоры и реализовывать новые интересные задачи.
Список использованной литературы:
- 1. How to Build a Robot. Parkyn J. Dennis Publishing Ltd. 2014. - 148 c.
- 2. Методы управления робототехническими приложениями. Борисов О.И., Громов В.С., Пыркин А.А. Изд-во:Университет ИТМО. 2016. - ПО с.