В статье рассматриваются структура и графо-аналитический метод кинематического анализа шестизвенной группы Ассура. Проведен сравнительный анализ существующих методов кинематического анализа и предложен новый подход к структуре и кинематике шестизвенной группы Ассура.
Одним из направлений экономического развития любого государства является широкое применение в различных отраслях средств механизации и автоматизации производственных процессов. Это в свою очередь связано с применением или созданием новых механизмов, обладающих наперед заданными свойствами. Создание новых машин и механизмов либо использование существующих возможно лишь на основе серьезного научного анализа, позволяющего обеспечивать высокую эффективность машин уже на стадии их проектирования. Процесс проектирования в обязательном порядке должен включать этапы выбора структурной схемы, кинематического и силового расчетов. Каждый этап процесса проектирования механизма одинаково важен. Очевидно, что в зависимости от выбора структурной схемы механизма можно получать те или иные свойства.
Л.В. Ассур показал, что кинематическую цепь механизма целесообразно рассматривать как состоящую из ведущей и ведомой цепей. Одно из свойств ведомой цепи таково, что во многих случаях ведомую цепь можно разделить на части, каждая из которых обладает такими же основными свойствами, как и вся ведомая цепь в целом. Эти части называются структурными группами Ассура. Вопросы кинематического анализа структурных групп Ассура должны занимать в процессе проектирования механизма весомое место. Зная свойства групп Ассура, можно точно знать свойства проектируемого механизма. До настоящего времени кинематический анализ групп Ассура проводился в составе механизма. Если следовать указаниям Ассура, все свойства механизма должны определяться свойствами группы Ассура.
Вопросам кинематического анализа групп Ассура в составе механизма посвящено множество работ. Разработано множество методов кинематического анализа групп Ассура в составе механизма. Особенно разработанными являются методы исследования двухзвенных групп (диад). В меньшей степени разработаны и известны методы анализа четырехзвенных групп. Группы же Ассура, включающие в своем составе шесть звеньев, только в последнее время стали объектом структурного и кинематического исследования. Наиболее полно и всесторонне шестизвенные группы Ассура рассматриваются в работах Л.Т. Дворникова, С.П. Старикова [1]. Тем не менее, вопросы структуры и кинематики этих групп Ассура требуют, на наш взгляд, своего дальнейшего исследования.
Как показывает практика различных отраслей промышленности, широкое применение находят механизмы, включающие в своем составе шестизвенные группы Ассура. Это объясняется их высокими кинематическими возможностями: получение необходимых траекторий, длительных выстоев выходных звеньев, высокая жесткость и т.д. Исходя из этого можно утверждать, что разработка методов кинематического исследования шестизвенных плоских групп является проблемой весьма актуальной.
В данной работе делается попытка рассмотреть кинематику шестизвенной группы Ассура в тесной связи с методом ее структурного «происхождения». В соответствии с принципом образования механизмов по Ассуру разрабатывались и методы образования групп Ассура. Следует подчеркнуть, что методы образования групп Ассура, существующие сегодня, не составляют единого непрерывного процесса образования механизмов. Вначале необходимо получить, каким-то способом (а таких способов множество) группу Ассура, а затем, присоединив ее к ведущему звену, получить механизм. Нам представляется более целесообразным рассматривать кинематику группы Ассура с учетом способа ее
образования. Основой этого способа образования может быть использование понятия связи. Ранее нами было показано, что существующие группы Ассура, в том числе шестизвенные, можно получить путем наложения геометрических связей внешних или внутренних на исходный механизм. Не рассматривая заново этот процесс, покажем как была образована шестизвенная группа Ассура, представленная на рисунке 1. Рассматриваемая группа Ассура (рисунок 1) образована путем наложения на исходный механизм с W = 1 внешней геометрической связи (например звено 1). В качестве исходного механизма принят механизм, состоящий из звеньев 2, 3, 4, 5, 6.
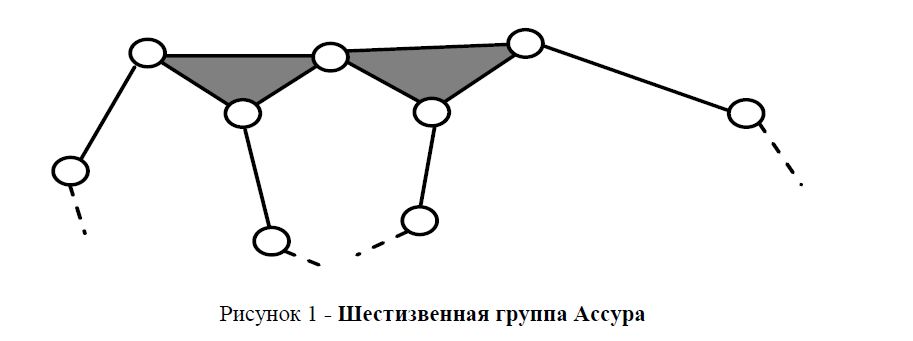
Рисунок 1 - Шестизвенная группа Ассура
Нетрудно заметить, что в этом случае шестизвенная группа Ассура представляет собой механизм 2-го класса (звенья 6, 5, 4) по классификации И.И. Артоболевского с присоединеной к нему диадой (звенья 3, 2). При наложении на него геометрической связи в виде поводка 1 он превращается в группу Ассура. Если эту группу Ассура присоединить к ведущему звену (при W =1), то получается механизм 3-го класса по классификации И.И. Артоболевского со всеми вытекающими последствиями - сложность кинематического анализа, по сравнению с механизмами 2-го класса.
Кинематический анализ группы Ассура в составе механизма
На рисунке 2 представлена исходная шестизвенная группа Ассура в составе механизма с одной степенью подвижности.
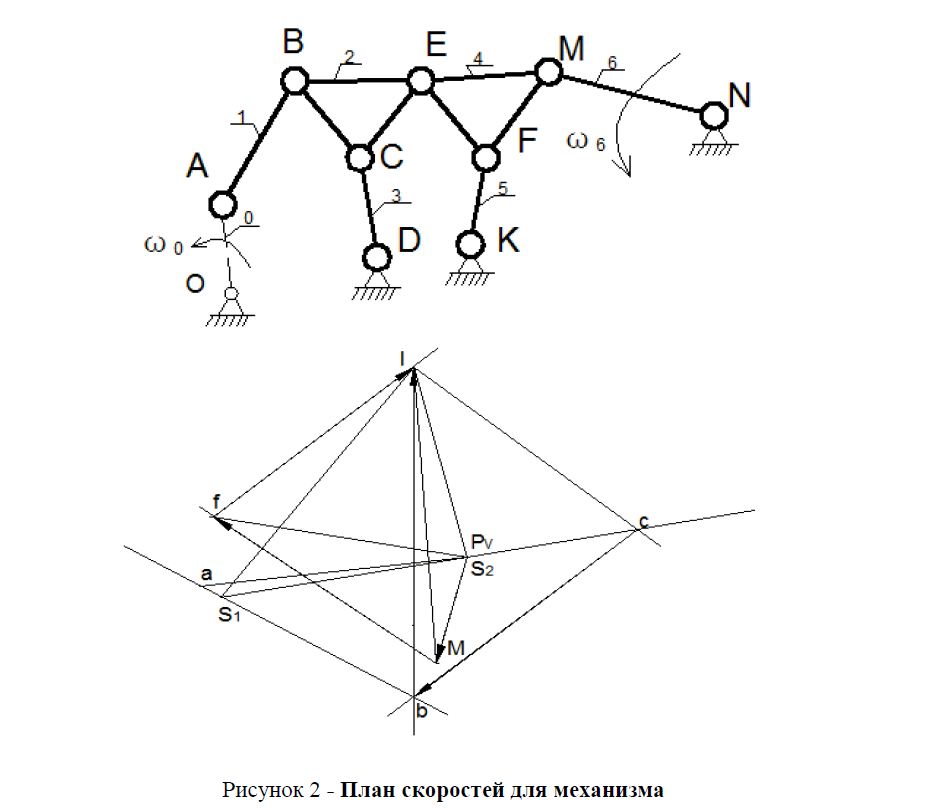
Рисунок 2 - План скоростей для механизма
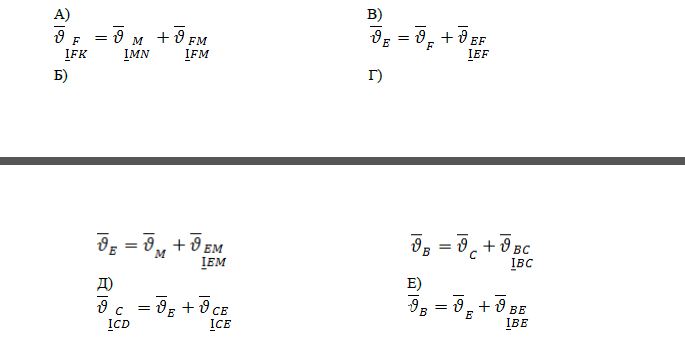
Используя метод замены ведущего звена, построим для всего механизма план скоростей по следующим векторным уравнениям. В качестве ведущего звена принято звено 6.
На рисунке 2 показан механизм 3-го класса с шестизвенной группой Ассура и план скоростей.
Кинематический анализ группы Ассура методом замены ведущего звена вне состава механизма (рисунок 3)
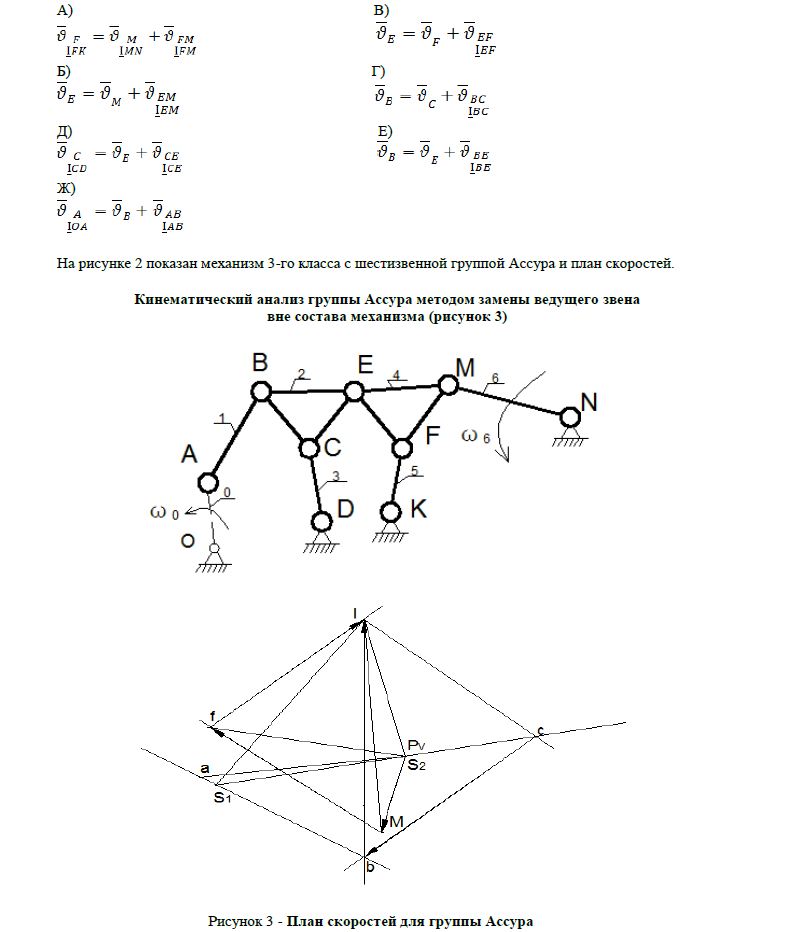
Рисунок 3 - План скоростей для группы Ассура
Построение плана скоростей для группы Ассура вне состава механизма будем вести в следующем порядке. В начале группу Ассура представим как механизм (звенья 2, 3, 4, 5, 6) с наложенной связью (звено 1). Следует заметить, что в этом случае снижается класс механизма до второго и класс групп Ассура, входящих в исходный механизм Рассмотрим кинематику механизма без связи — звено 1. В качестве ведущего звена примем звено 6 (ничего не измениться, если в качестве ведущего звена принять звено 1. Построение плана скоростей будем вести по уравнениям:
Нетрудно заметить, что в этом случае мы не можем найти только абсолютную скорость будущего ведущего звена 1, т.к. оно у нас пока не дано. Если положение ведущего звена будет известно, то достаточно из найденного абсолютного полюса плана скоростей провести линию действия скорости точки А до пересечения с продолжением отрезка bs1/ Все остальные скорости останутся без изменения. Как видно, план скоростей для самой группы Ассура целиком и полностью соответствует плану скоростей, построенному с использованием метода замены ведущего звена для группы Ассура в составе механизма (рисунок 2). Это дает основание утверждать, что кинематический анализ группы Ассура с учетом наложенной связи заслуживает внимания и изучения, во всяком случае для рассматриваемой группы Ассура.
Литература
- Дворников Л.Т. Исследование кинематики и кинетостатики плоской шарнирной шестизвенной группы Ассура с четырехугольным замкнутым изменяемым контуром // Известия вузов, «Машиностроение». - 2008. - № 4. - С. 3-10.
- Дворников Л.Т. Кинематическое и кинетостатическое исследование двухсекционного грохота // Вестник Кузбасского государственного технического университета. - 2008. - № 1 (65). - С. 44-46.
- Стариков С.П. Кинематическая разрешимость семизвенного кривошипно-ползунного механизма для прессования // Наука и молодежь: проблемы, поиски, решения. Труды Всероссийской научной конференции студентов, аспирантов и молодых ученых / Под ред. С. М. Кулакова. - Новокузнецк: Из-во СибГИУ. Техн. Науки. - 2008. - Ч. II. - Вып. 8. - С. 264 –