К навигационным системам относятся технические средства, предназначенные для автоматического дистанционного измерения координат объектов манипулирования. Специфические требования к моделям навигационных систем вытекают из их принципов действия и особенностей функционирования.
По принципу действия навигационные системы роботов не отличаются от соответствующих измерительных систем, используемых в радио-, звуко- и гидронавигации, при физических измерениях и других исследованиях. Особенность заключается в том, что в робототехнике применяется почти весь арсенал средств из перечисленных областей, что приводит к более сложной процедуре классификации.
Навигационные системы роботов подразделяются на:
а) системы измерения угловых координат;
б) системы измерения дальности и скорости;
в) системы поиска и обнаружения.
Эти навигационные системы в свою очередь подразделяются на свои подсистемы различные по принципу действия и устройству.
Системы измерения угловых координат
Телевизионная угломерная система
Данная система предназначена для автоматического измерения угловых координат объекта в двух плоскостях: горизонтальной β и вертикальной ε. В состав системы (см. Рисунок 1) входят: телевизионная камера ТВК, имеющая в своем составе фокусирующую оптику, видикон или твердотельные оптические элементы; телевизионный приемник с разверткой изображения ТВП; монитор М для демонстрации изображения; оптический дискриминатор ОД; усилительные и фильтрующие элементы УФ; схема задержки СЗ; генератор стробов ГС; преобразователь времени задержки в напряжение П; приводы поворота ТВК по координатам β и ε.
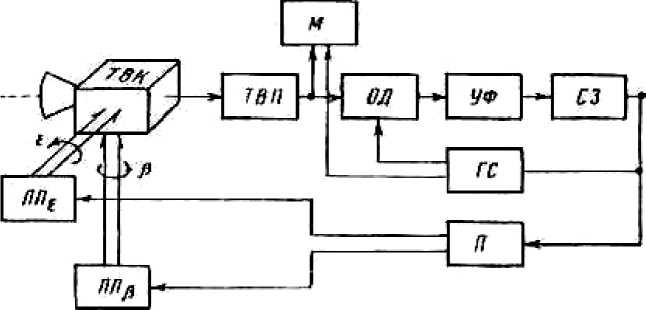
Рисунок 1 - Телевизионная угломерная система
Система работает по замкнутому циклу и имеет два контура управления – внешний, замыкающийся через приводы поворота ТВК, и внутренний, замыкающийся через генератор стробов. Работа системы основана на так называемом принципе «следящего окна».
Перемещение изображения объекта в системе координат (β, ε) должно отслеживаться стробами, образующими «окно». Принцип слежения осуществляется следующим образом. Сигналы изображения объекта и сигналы стробов подаются наоптический дискриминатор ОД, где вырабатываются четыре напряжения, пропорциональные площади изображения участков объекта в каждом из стробов. Обозначим эти напряжения буквами U1,U2 ,U3,U4 соответственно для стробов 1, 2, 3, 4 «следящего окна». Из этих напряжений формируются два сигнала рассогласования:
Uβ= Uι + 4) - (U2 + U3)
Uε= (U1 + U2) - (U3 + u4). (L1)
Описанная система является дискретной, поскольку информация об угловом рассогласовании с ОД поступает с частотой следования кадров телевизионной развертки, а затем сглаживается и преобразуется в непрерывный сигнал при последующей фильтрации. По составу элементов – это система электромеханическая, поскольку исполнительными элементами поворотных приводов служат электродвигатели постоянного, переменного тока или шаговые. В последнем случае в преобразователе П выходным сигналом должен быть цифровой код.
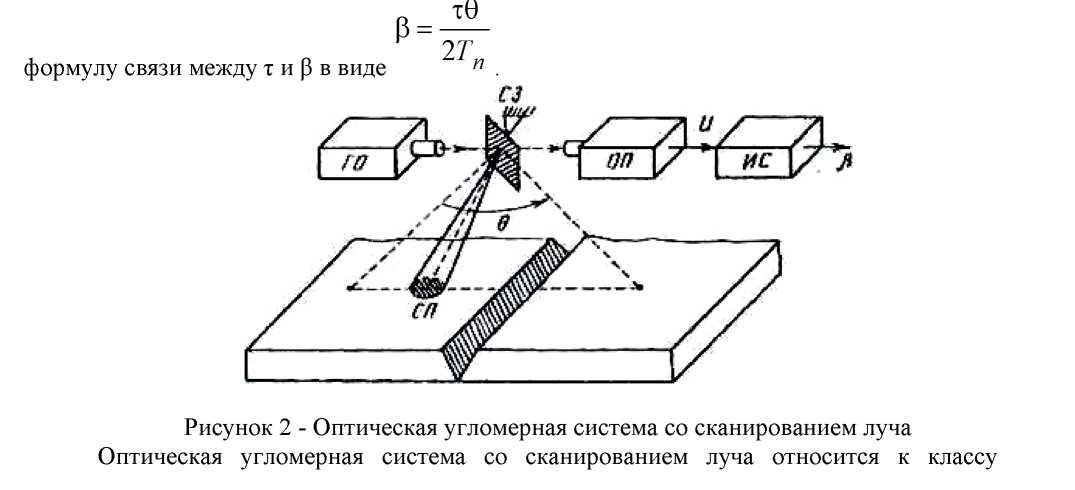
Оптическая угломерная система со сканированием луча
Использование оптических сигналов в навигационных системах роботов весьма распространено. Чаще всего применяют инфракрасные и лазерные системы, у которых удается сформировать узкие лучи света и тем самым обеспечить высокую пространственную разрешающую способность и большую плотность потока мощности.
Функциональная схема системы изображена на рисунке 2, на котором ГО – генератор оптического излучения с фокусирующей системой, СЗ – сканирующее зеркало, СП – световое пятно на поверхности объекта, ОП – приемник оптического сигнала, ИС – измерительная часть системы.
Генератор излучения, работающий в непрерывном режиме, с помощью фокусирующей оптической системы формирует узкий луч света, падающий на зеркало СЗ.
T
Механизм поворота зеркала обеспечивает сканирование луча в секторе θ с периодом п так, что ось луча движется вдоль прямой линии на поверхности объекта. На своем пути световое пятно пересекает область стыка двух свариваемых листов. Отражательные способности поверхности и стыка листов различны. Середина импульса отраженного
сигнала соответствует центру стыкуемых листов, поэтому интервал времени τ от начала отсчета до точки положения минимума амплитуды импульса будет характеризовать угловое отклонение β линии стыка от оси навигационной системы. Нетрудно получить
дискретных систем, поскольку информация об угловом положении оси стыка поступает с
Т
периодом п и работает по разомкнутому циклу.
Индукционная угломерная система
В системах такого типа используется принцип электромагнитной индукции, взаимодействия между генерируемыми и наводимыми магнитными полями. На этом принципе, в частности, основаны навигационные системы, предназначенные для управления подвижными роботами, перемещающимися вдоль уложенных на поверхности (или под ней) металлических шин.
Генератор высокочастотных колебаний ГВК и индукционная катушка ИК создают в пространстве высокочастотное магнитное поле. В уложенной на поверхности металлической шине Ш индуктируется наведенное магнитное поле, под действием которого в катушках К1 и К2 генерируются переменные напряжения. Обмотки катушек включены последовательно и встречно, поэтому выходное переменное напряжение равно разности напряжений, наводимых в катушках. Если шина расположена симметрично относительно катушек, то суммарное напряжение U0 будет равно нулю. Если шина окажется расположенной несимметрично, т.е. появится угловое отклонение β центра катушек от оси шины, то возникает разность напряжений U0. При изменении знака β будет меняться фаза этого напряжения. В приемнике Пр напряжение U0 усиливается, фильтруется и подается на фазочувствительный выпрямитель ФЧВ, постоянно выходное напряжение U которого пропорционально амплитуде разностного переменного напряжения, а знак определяется фазой этого напряжения.
Исходя из описанного принципа действия, индукционная система относится к классу систем непрерывных, работающих по разомкнутому циклу, а по составу элементов – к электромагнитным.
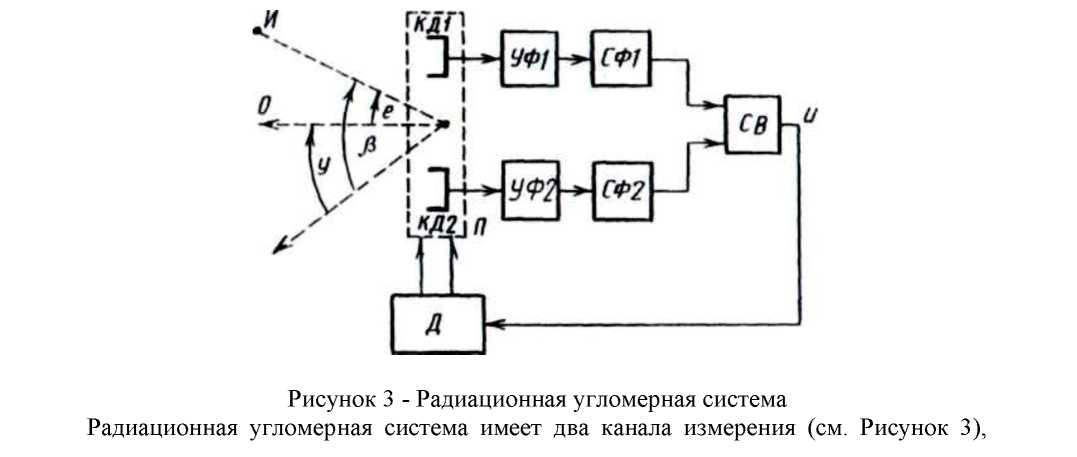
Радиационная угломерная система
Для измерения координат объектов в условиях запыленности, отсутствия освещения, в специальных средах могут применяться источники радиоактивного излучения, располагаемые на объекте. В этом случае измеритель работает в пассивном режиме, используя поток радиоактивных частиц в качестве источника информации. Наличие потока частиц делает такие системы дискретными, а случайные моменты излучения – дискретными со случайным периодом следования импульсов. В основе построения радиационных систем лежит принцип измерения интенсивности излучения в точке приема, т.е. оценки средней частоты появления импульсных сигналов.
44 включающих коллиматоры излучения и детекторы КД, усилители-формирователи импульсов УФ, сглаживающие фильтры СФ и схему вычитания сигналов СВ. Напряжение с СВ подается на двигатель Д, поворачивающий платформу П с коллиматорами в направлении на источник излучения U так, чтобы он находился на оси коллиматоров. Система работает по принципу измерения рассогласования θ между направлением на источник β и угловым положением платформы у. Для получения напряжения, пропорционального рассогласованию, коллиматор выполнен в виде цилиндра из материала, поглощающего излучение. В качестве детектора обычно используют комбинацию из сцинтиллирующего кристалла и фотоумножителя, ионизационные камеры или полупроводниковые структуры. При различных углах θ положения источника И, относительно, оси коллиматора интенсивность ν зарегистрированного излучения будет различной. Зависимость интенсивности от θ называется диаграммой направленности коллиматора.
- Системы измерения дальности и скорости
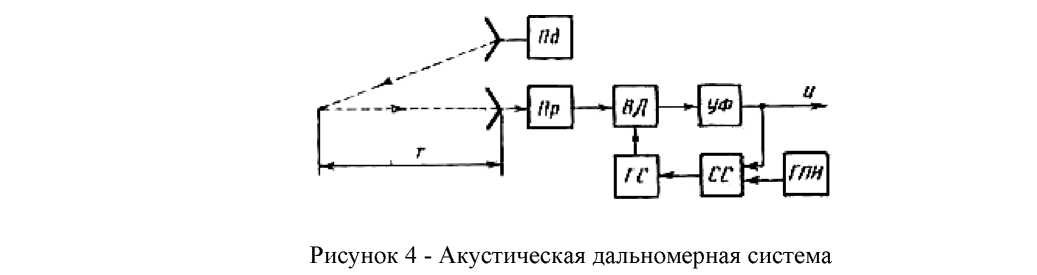
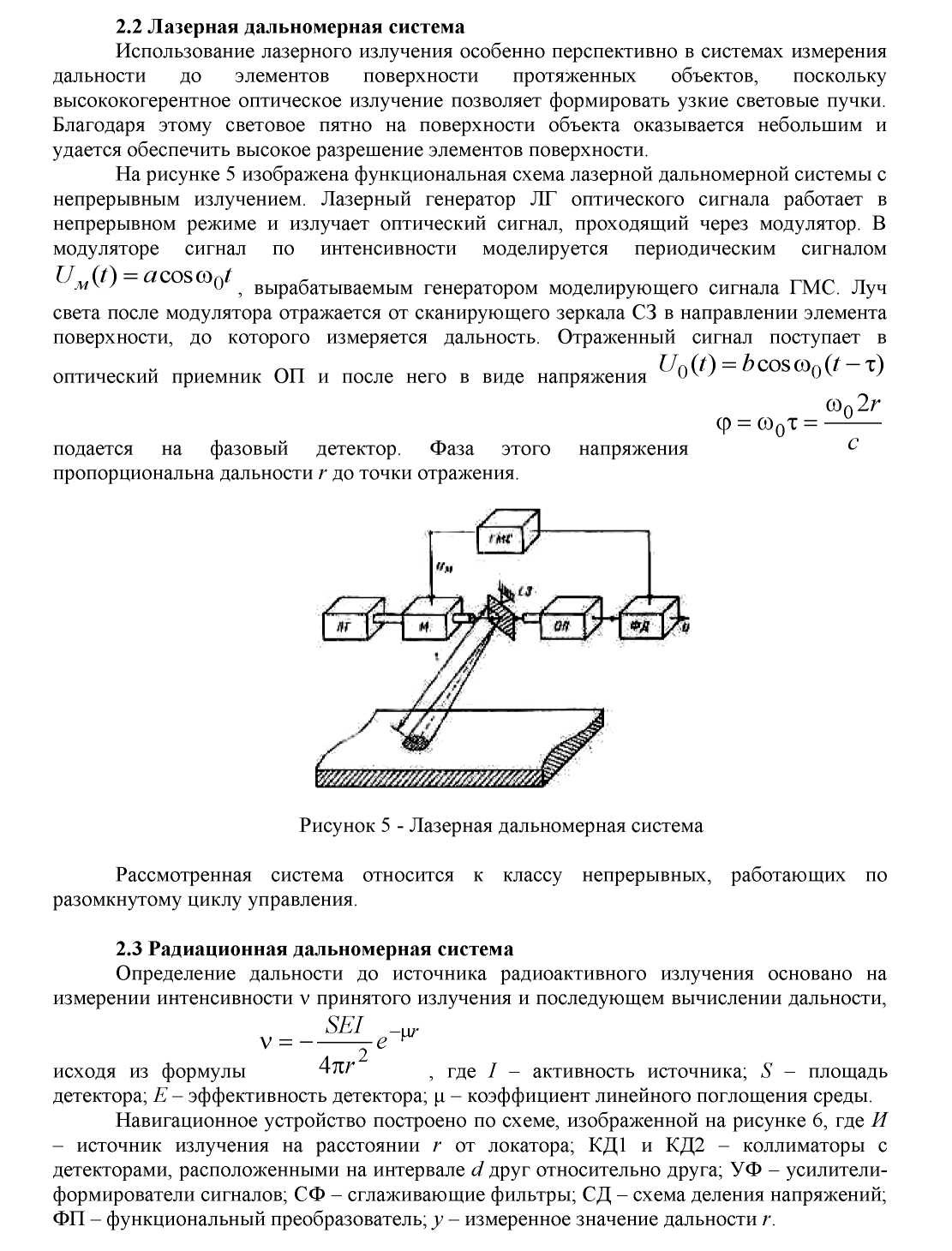
2.1 Акустическая дальномерная система
Импульсные ультразвуковые дальномеры нашли широкое применение на практике, в том числе при очувствлении роботов. Измерение дальности в ней основано на оценке времени запаздывания отраженного сигнала относительно момента его излучения.
= c0τ
Дальность определяется по формуле: 2 , где c0 – скорость распространения
ультразвуковых колебаний, зависящих от своей среды; τ – время запаздывания отраженного сигнала.
Импульсы имеют длительность и и излучаются передатчиком периодически
Т
через интервал п . На рисунке 4 изображена функциональная схема дальномерной системы, в которой Пд – передатчик, Пр – приемное устройство, ВД – временной дискриминатор, УФ – усилительные и фильтрующие элементы, СС – схема сравнения, ГС – генератор стробов, ГПН – генератор пилообразного напряжения.
Отраженный от объекта О сигнал принимается, усиливается, детектируется в приемном устройстве и в форме видеоимпульса подается на временной дискриминатор. Этот импульс задержан относительно начала отсчета, совпадающего с моментом излучения, на время τ. В то же время на выходе системы существует напряжение U, пропорциональное уже измеренному на предыдущих периодах излучения значению дальности r, которое поступает на схему сравнения. На второй вход схемы подается сигнал с ГПН, который запускается импульсами передатчика в момент их излучения. ГПН вырабатывает линейно возрастающее напряжение до момента излучения следующего импульса, а затем процесс периодически повторяется.
Система измерения дальности работает по замкнутому циклу и относится к системам дискретного действия потому, что носителями полезной информации о
дальности до объекта в ней являются импульсные сигналы.
Это навигационное устройство работает по принципу разомкнутого цикла и по составу элементов относится к классу электронных систем, так как все операции в нем производятся над электрическими сигналами. Недостатком системы является необходимость предварительного знания коэффициента поглощения среды. Чтобы избавиться от этой необходимости, систему можно строить по трехканальной схеме.
Заключение
Разработка интеллектуальных мобильных роботов для различных производственных и исследовательских целей является весьма важной и актуальной задачей.
Системы навигации состоят из модели внешней среды, содержащей в себе целевой объект, подвижные и стационарные препятствия. Информация о внешней среде воспринимается моделью сенсорной подсистемы и передается в систему искусственного интеллекта мобильного робота. На основе этой информации, с помощью подсистемы построения модели внешней среды, формируется план среды, по которому нейросетевой планировщик определяет оптимальный путь достижения цели. Контурный регулятор синергетического типа на основании найденной траектории движения и информации от внутренних датчиков вырабатывает управляющие воздействия для эффекторной подсистемы с учетом динамической и кинематической моделей мобильного робота.
Литература
- Фу К., Гонсалес Р., Ли К. Робототехника: Пер. с англ. – М.: Мир, 1989. – 624 с.
- Шикин А.В., Боресков А.В. Компьютерная графика. Полигональные модели. – М.: ДИАЛОГ-МИФИ, 2000. – 464 с.
- Путятин Е.П., Аверин С.И. Обработка изображений в робототехнике. – М.: Машиностроение, 1990. – 320 с.
- Хорн Б.К. Зрение роботов: Пер. с англ. – М.: Мир, 1989. – 487 с.