Важная часть работы агрегата зависит от двигателя. Двигатели являются связующим звеном между электронной и механической частью системы. В приводах подач современных станков с ЧПУ, обеспечивающих перемещения рабочих органов станка, на сегодняшний день применяются в основном шаговые двигатели либо сервоприводы.
Шаговый двигатель – электродвигатель, в котором, в отличие от обычного коллекторного, ток подается в обмотки статора по очереди, за счет чего вал ротора фиксируется в заданном положении. Шаговые двигатели распространены в самодельных станках с ЧПУ и бюджетных моделях промышленных гравировально-фрезерных станков, а также станков лазерной и плазменной резки.
В сравнении с сервоприводами шаговые двигатели дешевле, но стоимость – не единственный плюс. Они характеризуются рядом дополнительных преимуществ, которые обуславливают выбор в пользу приводов этого типа:
- Надежность. Шаговые двигатели отличаются высокой надежностью, так как в их конструкции отсутствуют изнашивающиеся детали. Рабочий ресурс двигателя зависит только от ресурса примененных в нем подшипников.
- Легкость настройки. Успех пуска системы с шаговым двигателем зависит только от правильности его подключения и корректного выбора драйвера. Сервомотор требуется настраивать дополнительно, он сложнее в подключении и в ремонте.
- Динамическая точность – максимальное отклонение реальной траектории перемещения инструмента от запрограммированной. Динамическая точность является определяющей характеристикой при обработке сложноконтурных изделий. Шаговые двигатели отличаются высокой динамической точностью, которая является следствием принципов работы шагового двигателя. Обычно на хорошей механике рассогласование не превышает 20 мкм.
- Столкновение с препятствием. Столкновение подвижных узлов станка с препятствием, в результате которого происходит остановка шагового двигателя, не вызывает у него каких-либо повреждений. В станке на базе сервоприводов при столкновении подвижных узлов с препятствием управляющая электроника определяет, что произошло повышение нагрузки и для компенсации повышенной нагрузки повышает уровень тока, подаваемый на двигатель, поэтому, если управляющая электроника не отслеживает подобную ситуацию, то возможно сгорание двигателя.
Недостатками шаговых двигателей являются резонанс, инертность и повышенный уровень шума. Первая проблема решается выбором драйвера с функцией подавления резонанса. Инертность – естественный недостаток, следующий из принципа работы шагового двигателя, но он проявляется только при быстром разгоне. Перед фрезерногравировальными станками ставятся другие задачи – например, при нанесении рельефного изображения на каменную плиту на ускоренные перемещения приходится не более 1% времени. Уровень шума – последний параметр, на который обращают внимание в условиях массового производства, здесь важнее стоимость оборудования.
Шаговые двигатели делятся на три основные категории:
- -двигатели с постоянным магнитным сопротивлением;
- -двигатели с переменным магнитным сопротивлением;
- -гибридные двигатели.
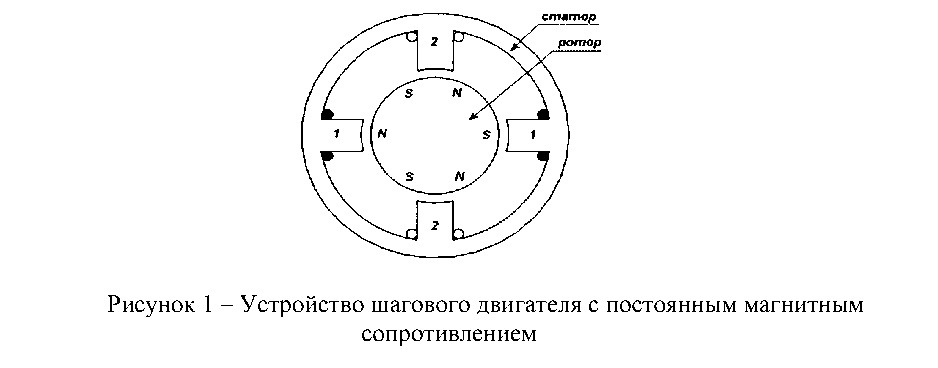
Шаговый двигатель с постоянным магнитным сопротивлением оснащён статором с обмотками и ротором с постоянным магнитами. Если ток попадает в одну из обмоток, то ротор переворачивается для достижения позиции, при котором противоположные полюса оказываются на крайних точках друг от друга (см. рис. 1).
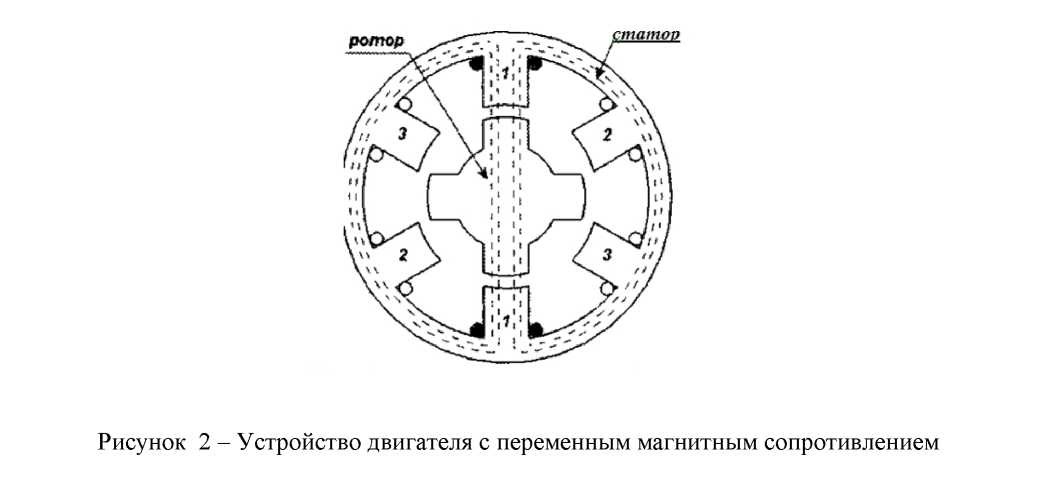
На статоре шагового двигателя, имеющего переменное магнитное сопротивление, несколько полюсов. Когда в одну из обмоток подаётся ток, ротор будет стараться принять позицию, при которой поток окажется замкнутым. Его зубья при этом окажутся на уровне полюсов статора, где обмотки получили ток. Когда его отключают и направляют в другую обмотку, ротор совершает поворот, вновь пытаясь замкнуть зубьями ток (см. рис. 2).
Гибридные двигатели являются самыми популярными, так как их конструкция предусматривает большее число зубьев и полюсов. Поэтому шаг их вращения намного меньше.
Определить тип двигателя можно даже на ощупь: при вращении вала обесточенного двигателя с постоянными магнитами (или гибридного) чувствуется переменное сопротивление вращению, двигатель вращается как бы щелчками. В то же время вал обесточенного двигателя с переменным магнитным сопротивлением вращается свободно.
В зависимости от конфигурации обмоток двигатели делятся на биполярные и униполярные. Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовываться драйвером. Для такого типа двигателя требуется мостовой драйвер, или полумостовой с двуполярным питанием. Всего биполярный д вигатель имеет две обмотки и, соответственно, четыре вывода. Униполярный двигатель также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При этом существенно упрощается схема драйвера. Драйвер должен иметь только четыре простых ключа. Таким образом, в униполярном двигателе используется другой способ изменения направления магнитного поля.
При выборе шагового двигателя одной из важнейших характеристик является его скоростные качества, то есть зависимость момента на валу от скорости вращения. Сравнить и оценить эту характеристику можно зная значения сопротивления и индуктивности обмоток выбираемого двигателя. Чем больше соотношение сопротивления к индуктивности, тем быстрее нарастает ток в обмотках и тем большую скорость вращения можно достичь без существенного падения момента.
Литература
- Э.Тихомиров, В. Васильев. Микропроцессорное управление электроприводами станков с ЧПУ. - М.: Машиностроение, 1990 - С.320.
- Кенио Такаши. Шаговые двигатели и их микропроцессорные системы управления: Пер. с англ., М.: Энергоатомиздат, 1987 - С.199.