В статье предлагается алгоритм адаптивного управления с минимальным временем процесса управления для построения модели управления динамической системой, в составе которой имеется элемент дифференцирования. Приводится пример моделирования системы.
Адаптивное управления является актуальной задачей современных исследований теории управления динамическими системами. Основными требованиями к качеству управления перечисленными процессами считаются непрерывность движения объекта, отсутствие автоколебаний и перерегулирования.
Известные методы синтеза систем управления [1] предполагают наличие полной априорной информации о параметрах объекта в распоряжении конструктора. Управляющая функция, используемая в таких системах, представляет наибольшее положительное или отрицательное значение сигнала управления. Особенность управления движением этих систем заключается в непрерывном изменении фазовых координат при скачкообразном изменении сигнала управления. Для повышения скорости отработки задания в состав управляемого привода включают элементы дифференцирования. Дифференцирование разрывной функции, какой является сигнал управления, в моменты переключения приводит к скачкообразному изменению некоторых координат объекта. В таком случае разумно использовать адаптивный подход. В задачах адаптивного управления при этом возникает проблема выбора точки, по которой необходимо делать коррекцию вектора неизвестных параметров.
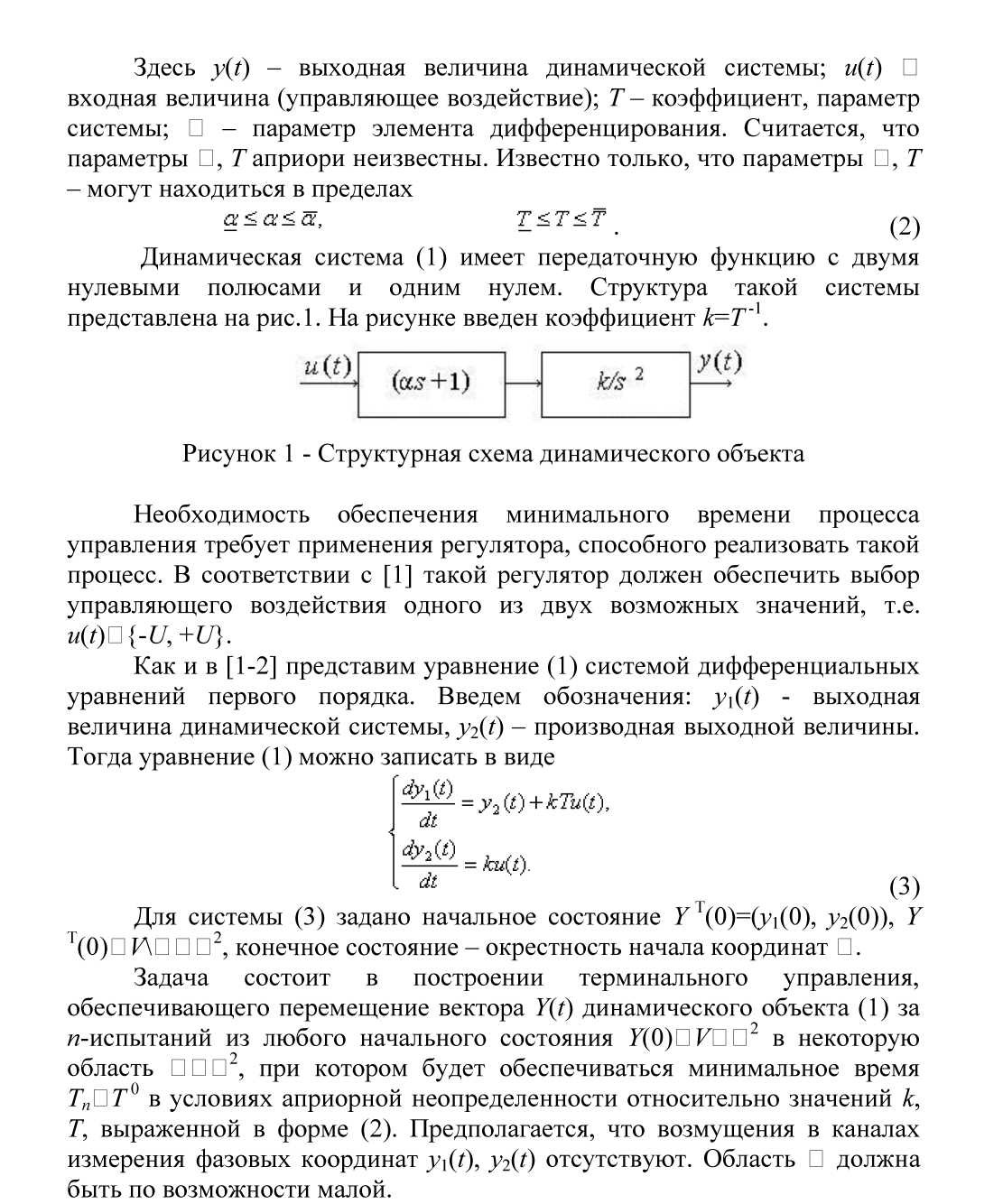
Постановка задачи. Пусть имеется динамическая система, выходная величина которой является решением дифференциального уравнения вида
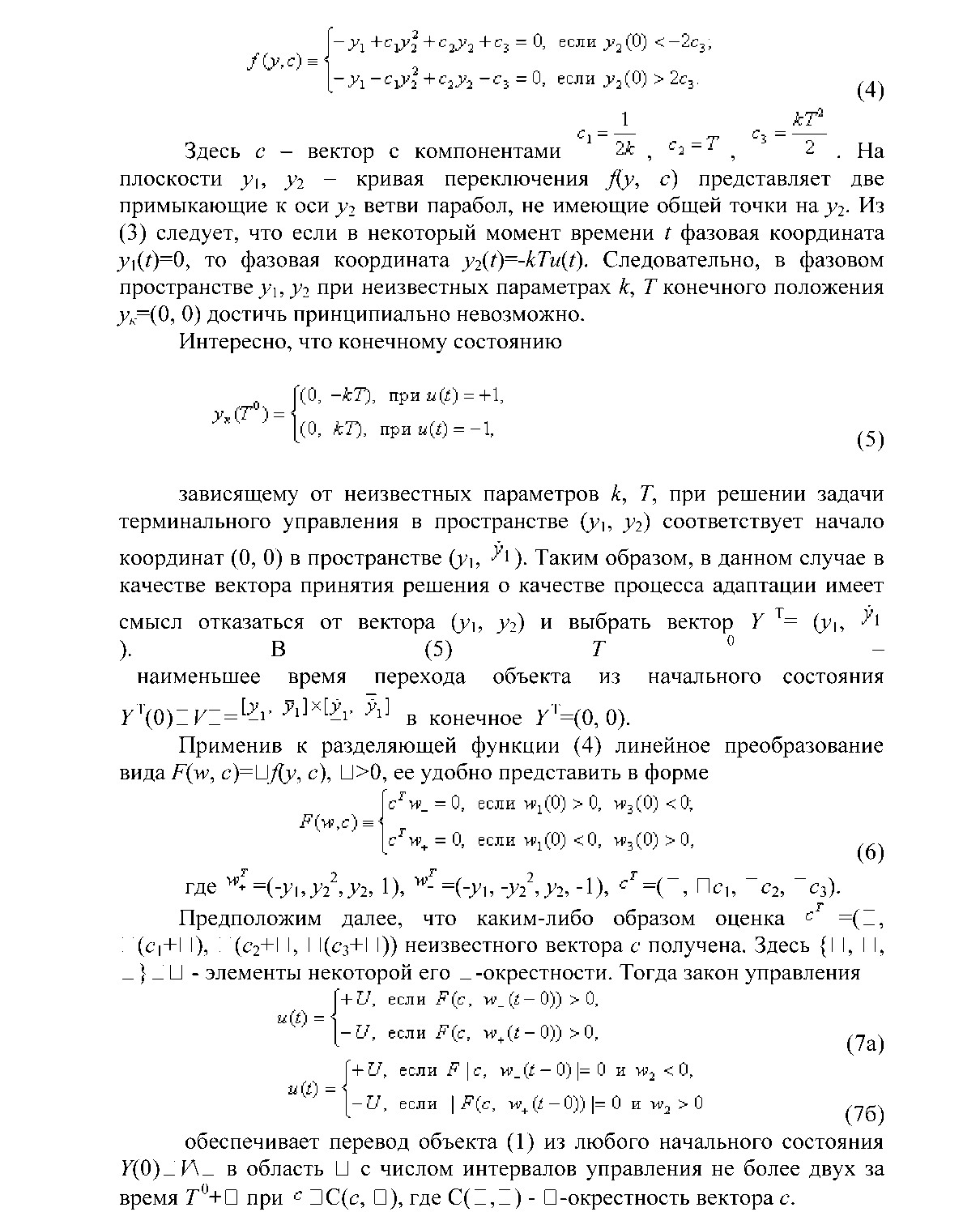
Неадаптивное управление. В соответствии с представлениями, развиваемыми в [2], смена знака управления производится в момент пересечения фазовой траекторией объекта линии переключения. Согласно (3) линию переключения на плоскости фазовых переменных y1, y2 можно представить выражением
40
41
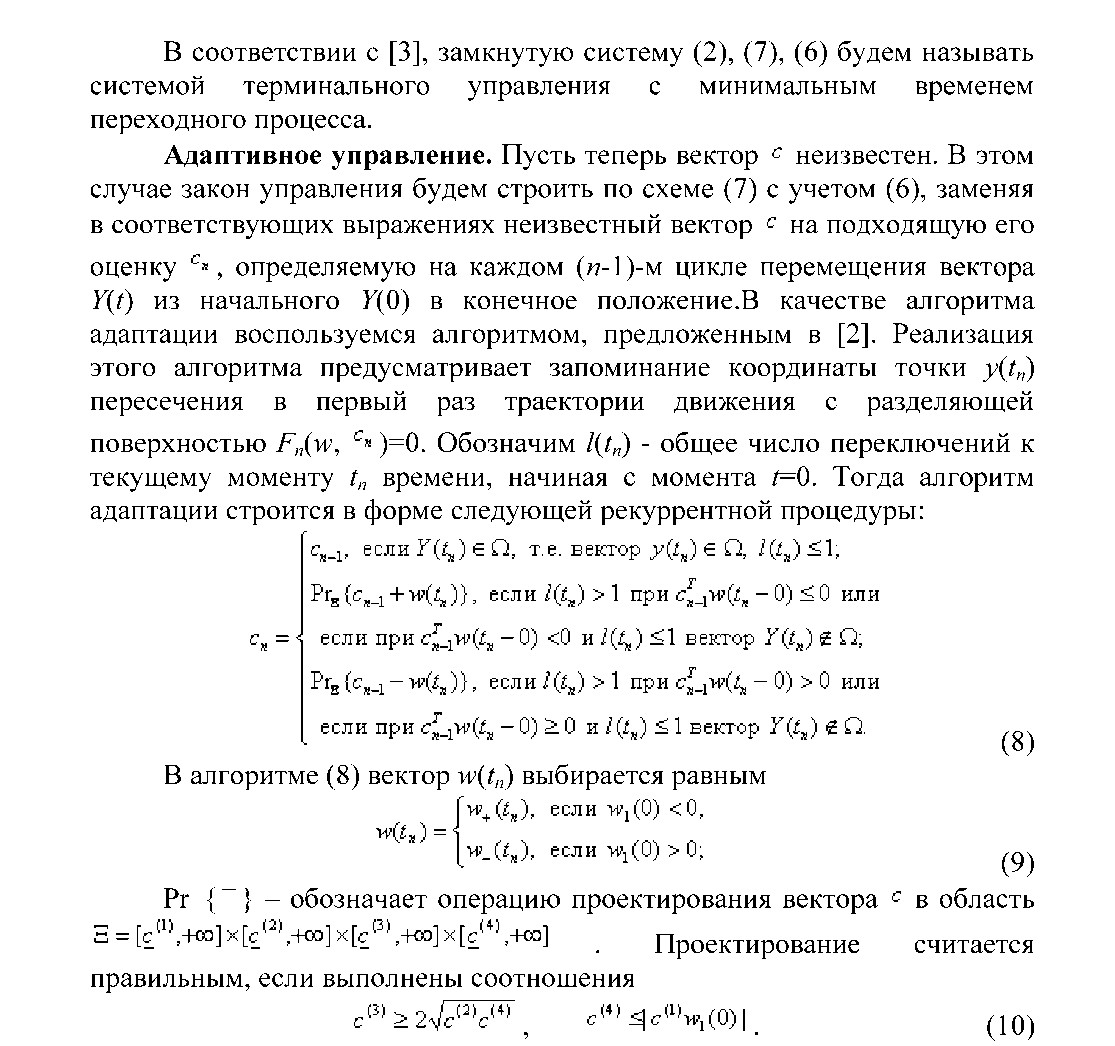
Процедура (8)-(10) определяет алгоритм адаптации полностью (после задания начального вектора с〇 с учетом (10)). Как видно из (8)-(10), для построения этого алгоритма снова понадобилось использование априорной информации о нижних границах компонент вектора с, определяемых (2).
Сформулированный результат дает строгое обоснование возможности достижения цели адаптации за конечное число испытаний, т.е. построение регулятора, обеспечивающего терминальное управление с минимальным временем переходного процесса.
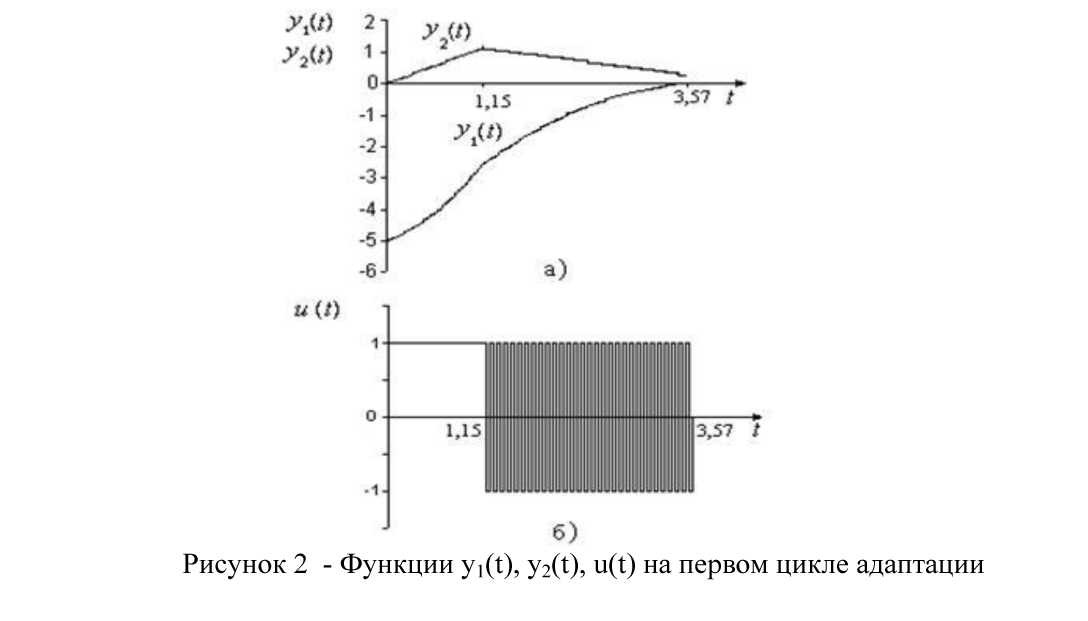
Моделирование. Эффективность предлагаемого алгоритма оценивалась моделированием объекта (1) с параметрами k=1 c-2, T=0,5 c. Результаты моделирования для начального состояния yT(0)=(-5,0, 0) представлены на рис.2, 3.
42
На рис.2 показаны функции y1(t), y2(t) на первом цикле адаптации с г
начальным =(2,0, 6,0, 2,45, 0,25), выбранным произвольно. Из рис.2 видно, что объект в скользящем режиме подходит к области □‚ процесс затянут во времени, точка Y(t) не попадает в □ из-за автоколебаний в ее окрестности.
Под действием алгоритма адаптации на n=126 цикле адаптации г
получен вектор параметров =(30,4, 21,13, 11,63, 0,1), обеспечивающий перемещение вектора Y(O) в область □ с одним переключением знака управления, как и должно быть. Функции y1(t), y2(t) после n=126 цикла адаптации представлены на рис.3.
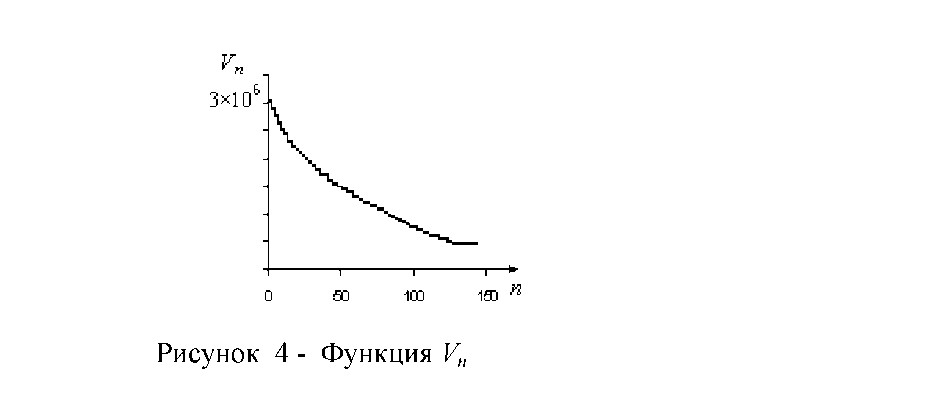
Сходимость алгоритма оценивалась с помощью функции
, (11) где □=1 000, c*=(1, 0,5, 0,5, 0,125)Т - вектор истинных параметров.
43
Характер функции Vn, представленный на рис.4, показывает, что предложенный алгоритм позволяет обеспечить довольно хорошее поведение системы в процессе адаптации.
- Алгоритм адаптации (8)-(10) с учетом (6), (7) сходится за конечное число шагов.
- Регулятор (6), (7) обеспечивает процесс управления с
минимальным временем после окончания процесса адаптации.
В отличие от других известных алгоритмов, предложенный здесь алгоритм использует дополнительную информацию о движении объекта в форме (5).

ЛИТЕРАТУРА
- Крутько П.Д. Алгоритмы терминального управления линейных динамических систем / П.Д. Крутько // Известия РАН. Теория и системы управления. - 1998. - №6. - С.33-45.
- Основы робототехники / Под ред. Е.П. Попова и Г.В. Письменного. М., 1990.
- Кучеров Д.П. Об одной задаче синтеза адаптивной системы управления субоптимальной по быстродействию / Кучеров Д.П. // Праці П'ято? Укра?нсько? конференці? з автоматичного управління, Автоматика- 98: Ки?в, 13-16 травня 1998 р. - Ч.І. - К., 1998. - С.238-244.