Уточнено расстояние между соседними рабочими органами культиватора – плоскореза удобрителя расположенными по клиновой схеме к энергонасыщенным тракторам. Приведены результаты экспериментов для данной схемы по степени сохранения стерни, отклонения глубины обработки и тяговому сопротивлению.
В настоящее время внесению минеральным удобрений придается большое значение. Разработка культиваторов-плоскорезов удобрителей к энергонасыщенным тракторам тягового класса ведется по различным компоновочным схемам, при этом возникают вопросы, связанные с расстановкой рабочих органов на центральной и боковой секциях. В зоне Северного Казахстана рекомендуется почвозащитная система земледелия. При этом предлагается использование плоскорезных рабочих органов.
Одним из основных показателей, влияющих на качество работы, является расстояние по ходу между рабочими органами. Нерациональная расстановка вызывает заклинивание почвы между рабочими органами, нависание растительных остатков на стойках.
Для культиваторов с различными органами авторами были предложены как схемы для расстановки, так и расстояние между ними по ходу. Оценку органов проводили по агротехническим и энергетическим показателям [1,2].
По данным В.П.Гниломедова [1], увеличение расстояния по ходу между рабочими органами приводит к росту тягового сопротивления; в исследованиях П.Н. Бурченко [2] тяговое сопротивление, наоборот, уменьшается, а после 0,8 м стабилизируется. В работах [3,4] показана целесообразность применения клиновой схемы расстановки рабочих органов для культиваторов-плоскорезов, но оценка проводилась только по агротехническими энергетическим показателям.
Поэтому целью данной работы является уточнение расстояния между смежными рабочими органами типа КПШ-9 для клиновой схемы по агротехническим показателям.
Предлагаемая установка состоит из трех секций, соединенных продольными шарнирами, состоящей из опорных колес с механизмом регулировки глубины обработки почвы, механизма навески и рабочих органов (рисунок 1). Рама каждой секции является многоэлементной, боковые секции выполнены в виде параллелограммов, что позволяет изменять угол расстановки секций и рабочих органов, которые можно дополнительно переставлять на продольных брусьях.
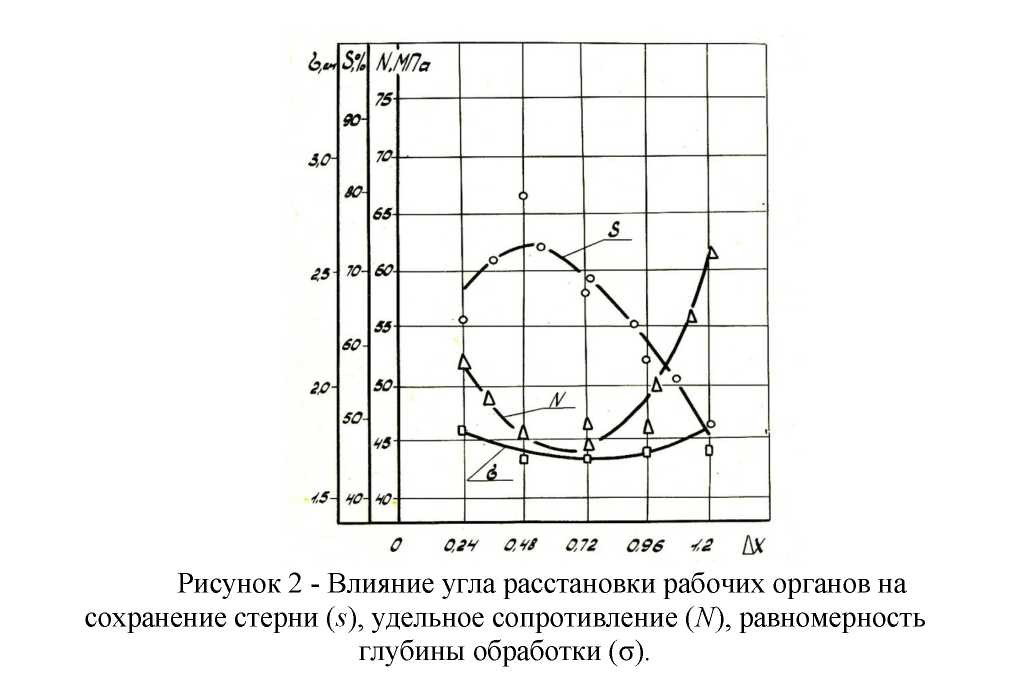
Для того чтобы ошибка не превышала 3-4%, с учетом погрешности измерения, в каждой точке зависимостей среднеквадратичного отклонения глубины обработки (σ) и удельного тягового сопротивления (N) от ∆х выборка составляла 500 ед. степень сохранения стерни находилась согласно ГОСТа 70.4.2-80, ошибка в пределах 5% результаты исследований приведены на рисунке 2.
Анализ полученных зависимостей показывает, что по агротехническим и энергетическим показателям плоскорезы с расстоянием по ходу между рабочими органами в пределах 0,48 – 0,72 м имеют лучшие показатели.
Эти данные подтверждают результаты моделирования процесса работы культиватора-плоскореза, приведенные в работе [3]: по равномерности глубины обработки клиновая схема имеет оптимум расстояния при ∆х = 0,4-0,6 м.
В связи с тем, что невозможно было добиться одинаковых условий проведения опытов с различными вариантами плоскорезов, дополнительно было изучено влияние расстановки рабочих органов на тяговое сопротивление с помощью передвижного почвенного канала.
173

Опыты проводились при средней скорости движения 2,1 м/с, глубине обработки 17 см. Твердость почвы в слое 0-20 см изменялась в пределах 0,9-3,5 МПа при влажности 37,1%от ППВ.
Передвижной почвенный канал (рисунок 3) состоит из основной рамы прямоугольной формы 1, который опирается на лыжи 2, и вспомогательной рамы 3, подвешенной на основную. На вспомогательной раме имеются брусья 4, на которых устанавливаются 5 рабочих органов от культиваторов КПШ-9.
Расстояние между лапами: ширина 0,9 м, а продольное направление – от 0 до 2 м. Между основной и вспомогательной рамами установлено тензозвено 5 регистрирующее тяговое сопротивление. При работе исключаются влияние со стороны трактора и опор и исследуются факторы, связанные со схемой расстановки и с расстоянием между рабочими
174

органами. Это дает возможность уменьшить ошибку, возникающую при проведении эксперимента, и сделать более достоверный вывод. Результаты опытов приведены в таблице 1.
Таблица 1. Показания тягового сопротивления плоскорезных лап в зависимости от расстояния между ними по ходу движения
|
Показатели |
Значение показателей |
|||||
|
Расстояние по ходу, м |
0,12 |
0,24 |
0,48 |
0,72 |
0,96 |
1,2 |
|
Тяговое сопротивление, кН |
22,9 |
20,0 |
19,5 |
21,0 |
21,0 |
24,4 |
Из таблицы видно, что наибольшее снижение тягового сопротивления наблюдается в варианте с расстоянием между рабочими органами по ходу движения 0,48 м, это значение входит в пределы, определенные на установке с переменными параметрами.
Таким образом, на основании проведенных опытов можно сделать вывод, что однорядная клиновая схема расстановки плоскорезных рабочих органов к культиваторам - удобрителям по степени сохранения стерни, среднеквадратичному отклонению глубины обработки и величине тягового сопротивления имеет лучшие показатели при расстоянии по ходу между соседними рабочими органами, 0,4-0,7 м.
ЛИТЕРАТУРА
- Гниломедов В.П. К вопросу о расстановке лап на раме культиватора. - В кн.: Известия Куйбышевского СХИ, 1996, т.18. - с. 2532.
- Бурченко П.И. и др. К обоснованию параметров скоростных культиваторов. - Тракторы и сельхозмашины, 1975, №1. - с. 24-26.
- Шульгин И.Г., Щербаков Н.В. Определение рациональных параметров культиватора плоскореза к тракторам тягового класса 8. - В кн.: Комплексная механизация производственных процессов в целинном земледелии. Алма-Ата, 1986. - с. 3-14.
- Щербаков Н.В. Ким С.А. Галямова А.А. Моделирование процесса работы широкозахватного культиватора - плоскореза - Материалы конференции, Минск, 2012. - с. 53-58.