Рассмотрент новый метод исследования систем управления с повышенным потенциалом робастной устойчивости на основе геометрической интерпретации второго метода Ляпунова. Условие робастной устойчивости получены в форме простейших алгебраических неравенств, которые являются условием существования вектор функции Ляпунова.
Исследована система управления с повышенным потенциалом робастной устойчивости в классе однопараметрических структурно-устойчивых отображений движением летательного аппарата по тангажу и показано предельное увеличение потенциала робастной устойчивости системы.
При автоматизации различных процессов необходимо учитывать, что большинство реальных систем управления проектируется и функционирует в условиях неопределённости. При этом обычно неопределенность может быть обусловлена незнанием и невозможностью точного определения истинных значений параметров объектов управления и непредсказуемым изменением их во времени в процессе эксплуатации. Поэтому в настоящее время актуальной проблемой для теории и практики управления динамическими объектами является разработка методов построения систем управления с повышенным потенциалом робастной устойчивости. В практических задачах, связанных с конструированием и моделированием процессов управления [1], в условиях существенной параметрической неопределенности повышение потенциала робастной устойчивости исключитфактор попадания в хаотическое движение и гарантирует применимость моделей и надежность работы спроектированных систем управления. В общей постановке исследование робастной устойчивости состоит в указании ограничений на изменение параметров системы управления [1,2], при которых сохраняется устойчивость. Эти ограничения определяются областью устойчивости по неопределенным параметрам системы.
В связи с этим возникла необходимость в разработке моделей и методов построения системы управления с неограниченно расширяемой областью устойчивости при наличии внешних и внутренних возмущений, названные системами управления с повышенным потенциалом робастной устойчивости.
В настоящее время посвящено большое количество работ по исследованию устойчивости систем управления с повышенным потенциалом робастной устойчивости с выбором законов управления для динамических объектов в классе структурно-устойчивых отображений из теории катастроф [3-6] и в этих работах в основном ограничиваются получением условий сохранения свойства устойчивости при широком диапазоне изменения параметров объекта и регулятора.
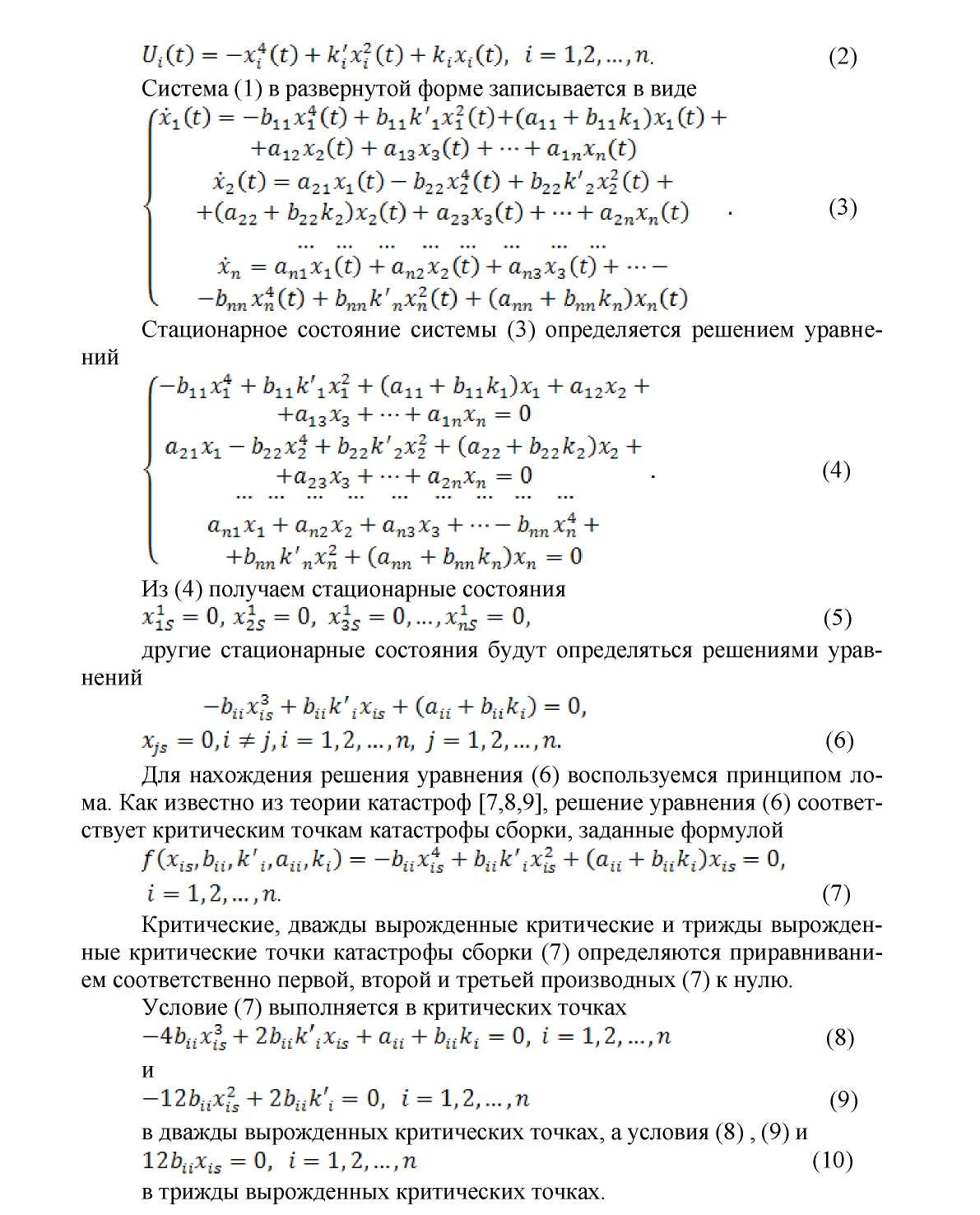
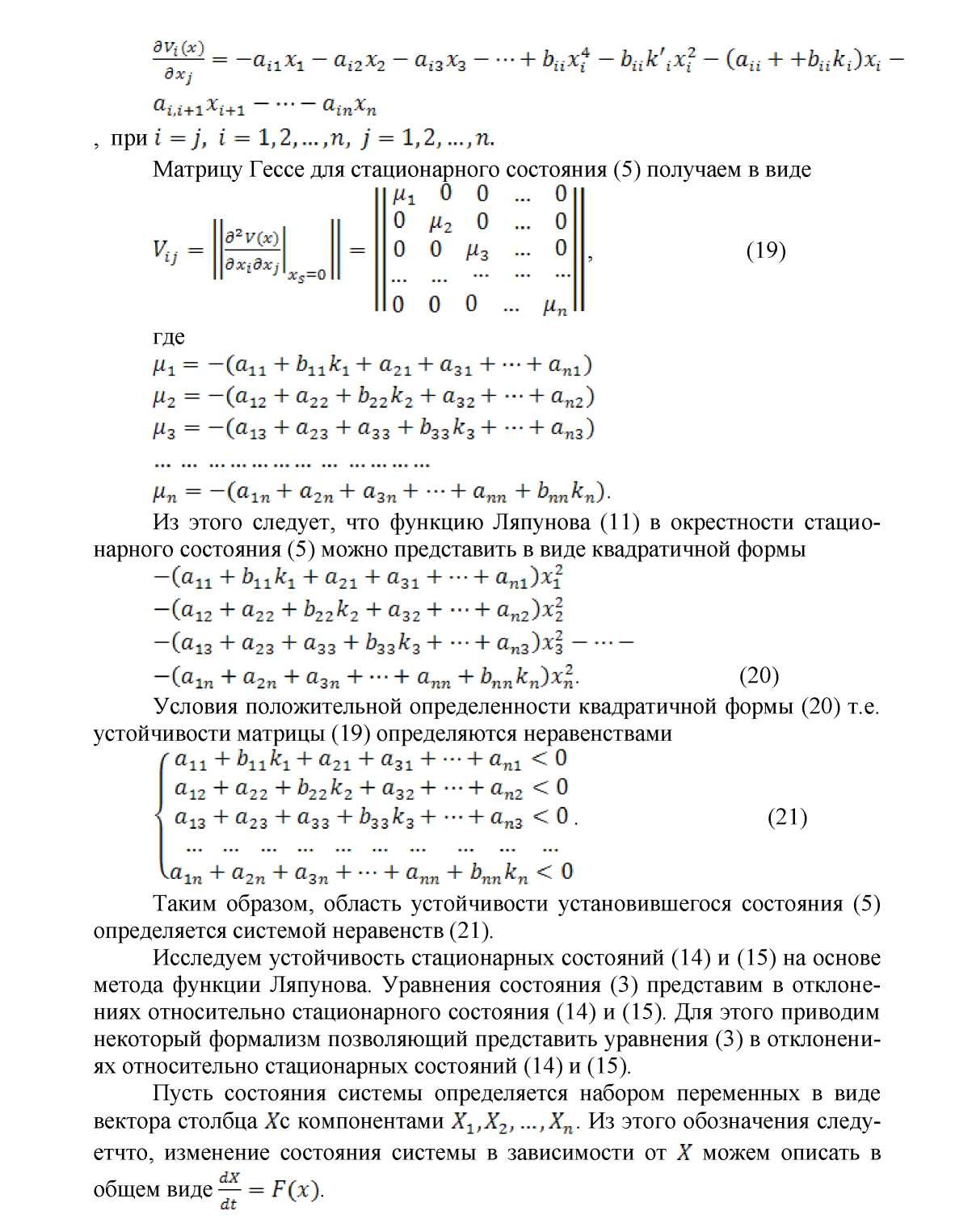
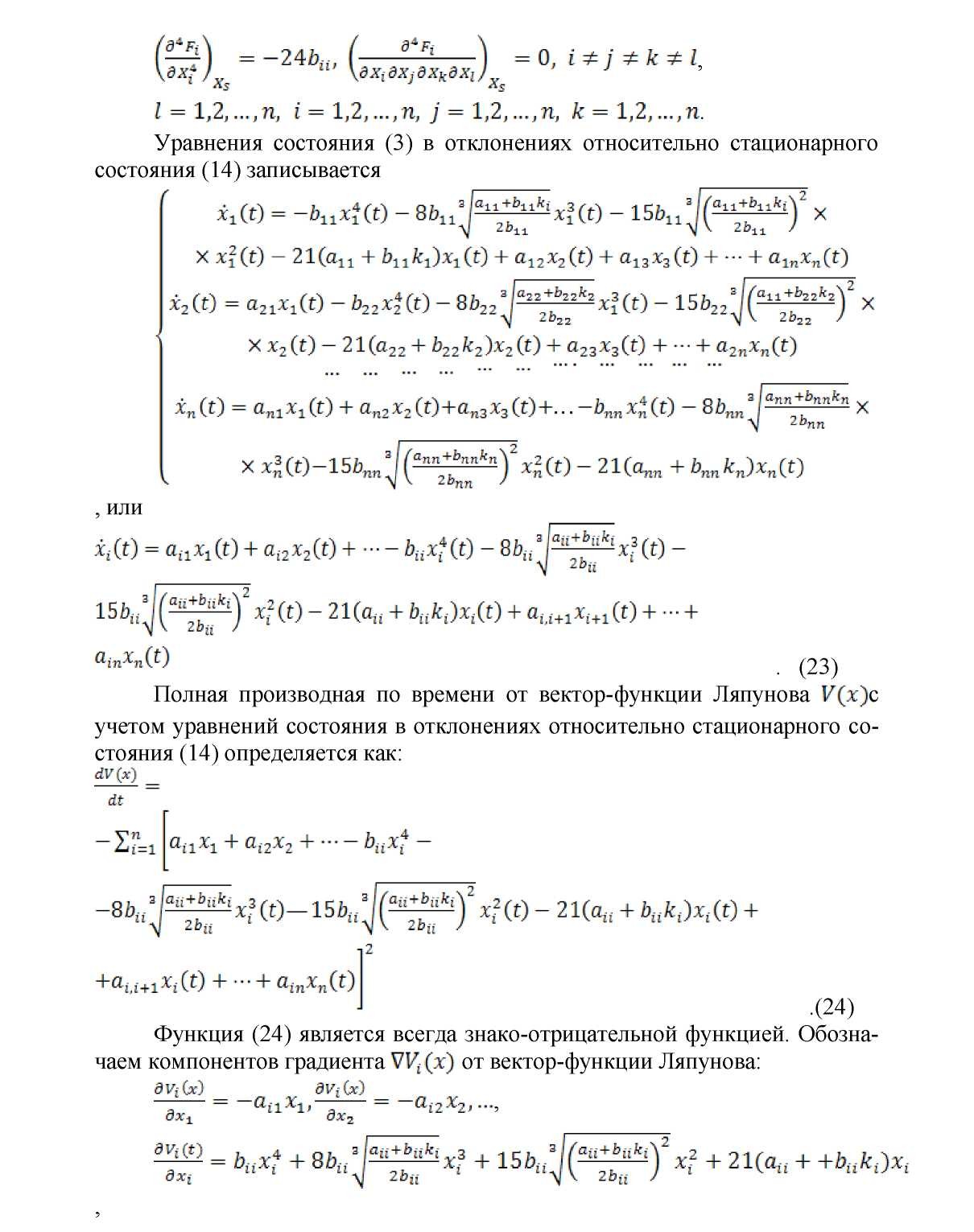
Рассмотрим задачу построения систем управления с повышенным потенциалом робастной устойчивости в классе двухпараметрических структурно-устойчивых отображений для объектов с n входами и выходами.
38
39
40

41
42
43
44

45
46
47

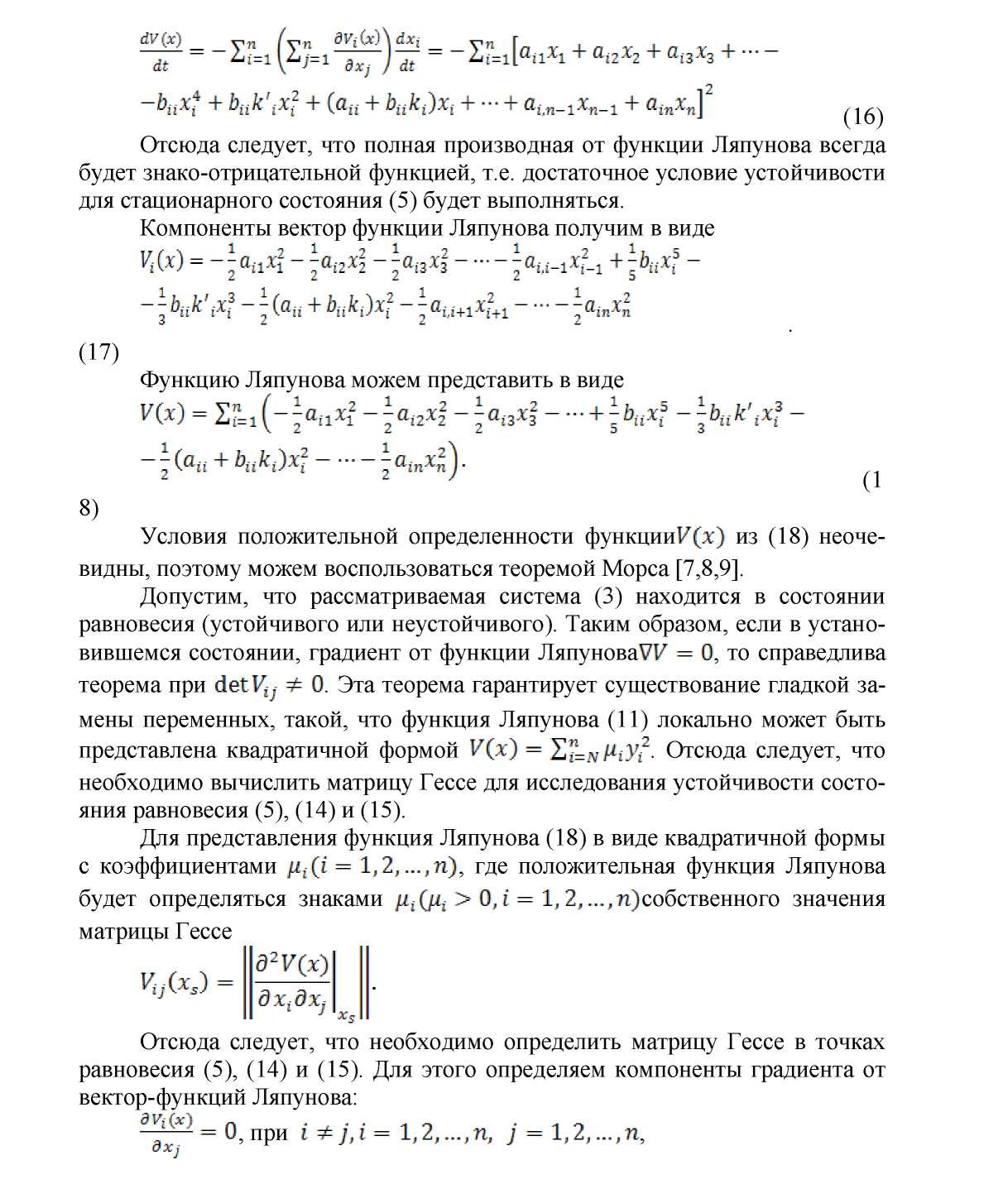
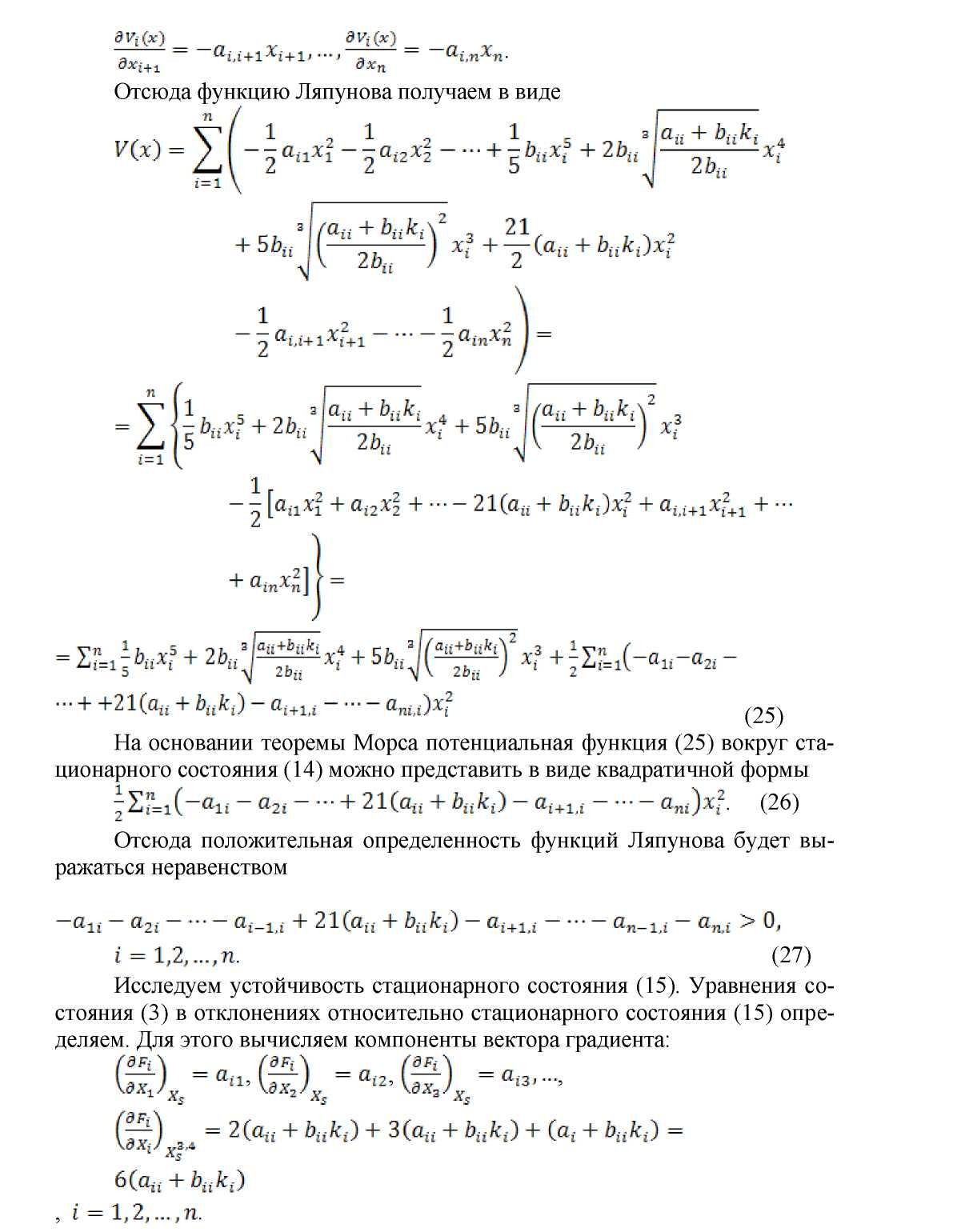
Таким образом, система управления, которая построена в классе двухпараметрических структурно устойчивых отображений будет устойчива.Она будет устойчива в неограниченно широких пределах неопределенных параметров объекта управления - ∶∖ ■ ∶ = 1 2 ‚ ‚ ?::∣. Стационарное состояние (5) существует. И оно устойчиво при изменениях неопределенных параметров объекта в области (14), а стационарные состояния (14) и (15) появляются при потере устойчивости состояния (5) и они одновременно не существуют. Среди стационарных состояний (14) и (15), стационарное состояние (14) является устойчивым при выполнении системы неравенств (21). Следует отметить, что (32) не существует, а существует состояние (5) и при выполнении системы неравенств (21) является неустойчивым.
ЛИТЕРАТУРА
- Поляк Б.Т., Щербаков П.С. Робастная устойчивость и управление. – М.: Наука, 2002. – С.303.
- Барбашин Е.А. Введение в теорию устойчивости – М.: Наука, 1967. С.225 .
- Gregoire Nicolis, Ilya Prigogine Exploring Complexity an Introduction. – New York, 1989.
- Бейсенби М.А. Методы повышения потенциала робастной устойчивости систем управления. – Астана, 2011. – 352 с.
- Siljak D.D. Parameter space methods for robust control design: a guided tour\\ IEEE Tr. OnAutom. Control. – 1989. - 34. №7-P.674-688.
- Бейсенби М.А., Кульниязова К.С. Исследование робастной устойчивости линейных систем управления. Вестник ЕНУ имени Л.Н. Гумилева: Научный журнал Евразийского национального университета имени Л.Н. Гумилева. Астана, 2010 - №2 (75) – с. 113-119.
- Постон Г., Стюарт И. Теория катастроф и ее приложения. – М.: Мир, 1980.
- Гилмор Р. Прикладная теория катастроф. Т.1. – М.:Мир, 1981.
- Abitova G., Beisenbi M., Nikulin V., Skormin V., Ainagulova A., Yermekbayeva J.J., Control system with high robust stability characteristics based on catastrophe function. Proceeding of the ICECCS 2012 (IEEE), Paris, France,2012.
- Малкин И.Г. Теория устойчивости движения – М.: Наука, 1966., 540 с.
- Воронов А.А., Матросов В.М. Метод векторных функций Ляпунова в теории устойчивости. – М.: Наука, 1987.