В данной работе предлагается новый подход синтеза законов управления по осуществлению движения объекта по предписанной программе.
Рассмотрена процедура синтеза в двух случаях:
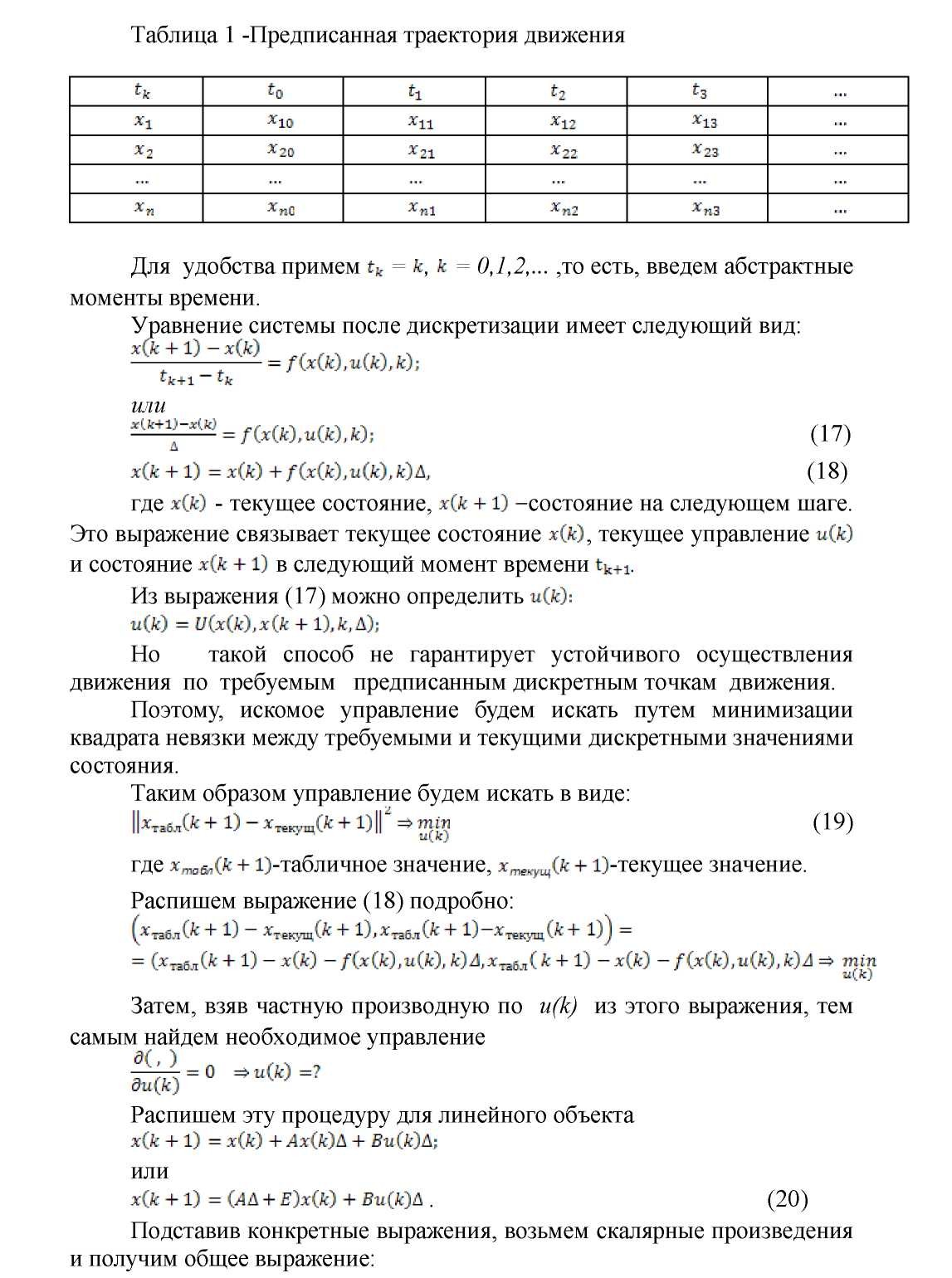
1)построение законов управления, когда предписанная траектория задается аналитически, 2) синтез законов в управления, когда предписанная траектория движения объекта задается в виде таблицы.
Во многих областях науки и техники – робототехники, космического приборостроения, микроэлектроники и в других – ставятся задачи синтеза замкнутых систем по осуществлению движения по предписанным траекториям (программам). Эти задачи относятся к неклассическим задачам теории управления.
В начале рассмотрим методику синтеза законов управления, когда предписанные программы задаются аналитически.
На сегодняшний день в случае, когда предписанная программа движения описывается аналитически, то существуют различные методы и подходы решения ставящихся задач. Это, в частности, работы П.Д Крутько, Ж.И. Батырканова.
Здесь приведем подходы синтеза, которые приведены в работах Батырканова Ж.И. и его последователей [1,2].
Суть предлагаемых подходов синтеза раскроем на примере, когда предписанная траектория задается аналитически в виде одного уравнения.
Пусть управляемый объект описывается системой:
(1) гдех= ■‚ _ ■‚: ■‚ . ■ - ξ ÷ŕ■∶т ∶ р ∶ ∶ ∶т ∶ ɪ÷ ;:ɪ,
u = (u11u2j ...,iLm)r — вектор управления,
Предписанная программа движения описывается аналитически в виде:
(2)
Для отыскания управления рассматривается полная производная по времени функции ÷ . на движениях системы.В соответствии с (2) имеем:
(3)
С учетом уравнений движения системы имеем:
(4)
Lul ƠĴƠ İ ƯĽ
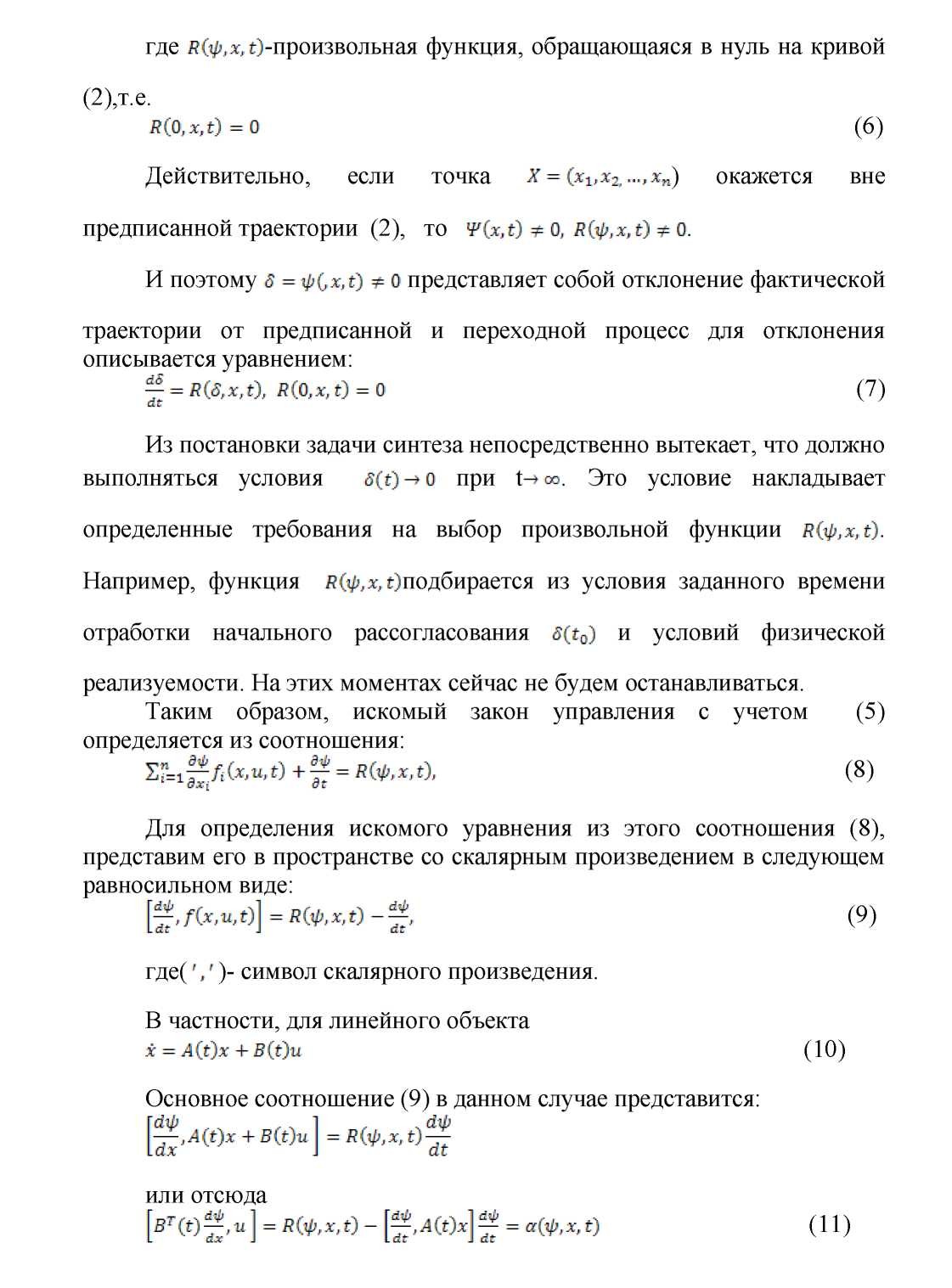
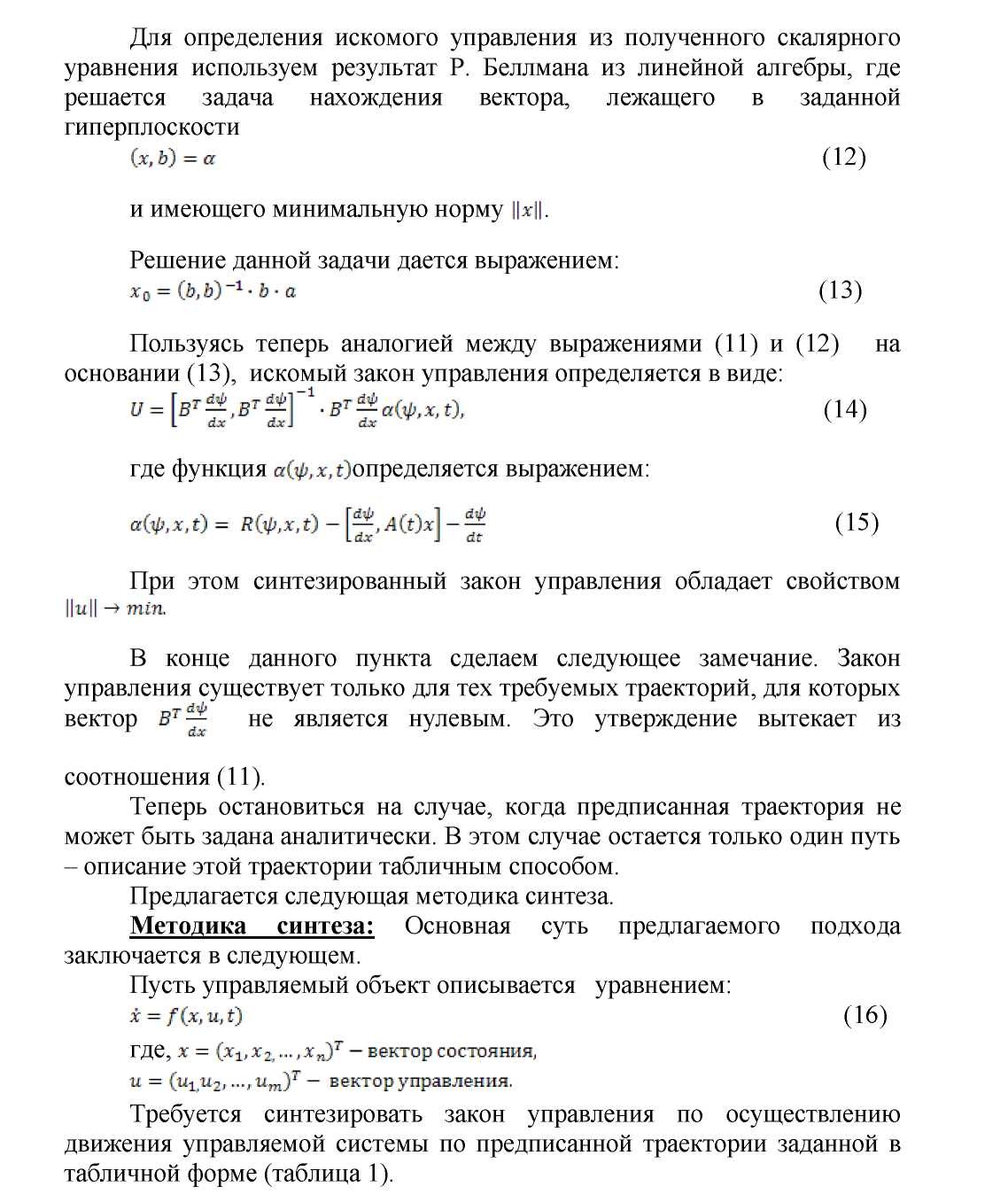
Разрешая это соотношение относительно искомой функции; . г ,
находим искомый закон управления, при котором движение объекта осуществляется по предписанной траектории. Но с практической точки зрения задача синтеза будет решена в том случае, если закон управления обеспечивает также возвращение точки = . _ .: . на предписанную траекторию ÷ . ∶ если по каким-либо причинам она окажется вне ее.
Другими словами, закон управления должен обеспечивать не только процесс движения по предписанной траектории, но и обеспечивать стабилизацию требуемого движения. Для такого закона управления,
очевидно, должно выполняться соотношение:

42
43
44
ЛИТЕРАТУРА
- Шаршеналиев Ж.Ш., Батырканов Ж.И. Синтез систем управления заданными показателями качества- Б. Илим, 1991. – 560 с.
- Батырканов Ж.И., Мадраимова А.Д., Кадыркулова К.К., Задача управления по заданной программе. Известия КГТУ им. И. Раззакова, №11, Бишкек 2007. – 300 с.
- Белман Р. Введение в теорию матриц-М.: Наука, 1969.- 490 с.
- Батырканов Ж.И., Аспирант Кадыркулова К.К.СИНТЕЗ УПРАВЛЕНИЯ ПО ТАБЛИЧНО ЗАДАННЫМ ПРОГРАММАМ. Материалы 50- юбилейной научной конференции молодых ученых и студентов. КГТУ- Бишкек, 2008. – 570 с.