В данной работе рассмотрен вопрос о влиянии параметров терм- множеств лингвистических переменных нечеткого регулятора на точность работы системы управления. Изучено влияние количества термов и вида функций принадлежности на качество управления.
Введение
Нечеткое моделирование, основанное на принципах нечеткой логики, применяется во многих современных системах управления. Область его применения постоянно расширяется по причине быстрорастущего развития техники и усложнения законов управления. Именно поэтому этот тип моделирования целесообразно применять для систем со сложными взаимосвязями управляемых величин и управляющих воздействий, когда использование классических методов управления невозможно. Основное место в нечетком моделировании занимают нечеткие регуляторы, их структура представлена на рис.1.
Принципы построения нечеткого регулятора
Алгоритм получения значений выходных переменных включает прохождение трех этапов: 1) установление значений функций принадлежности термов входных переменных; 2) определение истинности условий и заключений в используемых правилах нечеткой логики; 3) нахождение нечетких и количественных значений выходных переменных.
Значениями входных и выходных переменных нечеткого регулятора выступают слова или словосочетания (термы), которые образуют терм- множества. Каждый терм определяется функцией принадлежности, которая характеризует степень его отношения к нечеткому множеству [1]. База правил системы нечеткого вывода представляет собой совокупность выражений нечеткой логики, определяющих истинность или ложность взаимосвязи условий и заключений логических высказываний. Параметры функций принадлежностей (термов) и базы правил являются параметрами нечеткого регулятора.
Сложностью применения нечетких регуляторов в технических устройствах является подбор параметров терм-множеств и базы правил. Для решения этой задачи существует множество методов [2-3]. Учитывая достоинства и недостатки всех методов, был выбран метод подбора параметров нечеткого регулятора с помощью генетических алгоритмов (генетические нечеткие системы) [3].
Реализацией данного метода является компьютерная программа, созданная в среде MatLab. Она позволяет подобрать параметры нечеткого регулятора для системы управления с переменным количеством управляемых величин и одним управляющим воздействием. Алгоритм подбора параметров нечеткого регулятора с двумя входными переменными и одной выходной представлен в программе «Построение нечеткого регулятора эволюционными методами» (свидетельство госрегистрации № 2013610202).
Набор параметров нечеткого регулятора записывается в виде одномерного массива, элементы которого формируются генератором случайных чисел. Создание разнообразных комбинаций параметров осуществляется с помощью организации цикла по генерации одномерных массивов. Полученная совокупность данных фиксируется в виде массива (матрицы). Каждой строке матрицы сопоставляется значение функции приспособленности, отвечающей за критерий оптимизации. Элитные наборы параметров, к которым в дальнейшем будут применяться преобразования, включают комбинации параметров, позволяющие получить минимальное значение функции приспособленности и близкое к нему значение [4].
Предложенная программа позволяет сформировать нечеткие переменные с переменным количеством терм-множеств и следующими типами функций принадлежности: гладкая и линейная 5-функция, гладкая и линейная z-функция, треугольная, трапецеидальная и функция Гаусса.
Постановка задачи
Использование в алгоритме генератора случайных чисел при задании параметров нечеткого регулятора позволяет получить различные значения функции приспособленности, поэтому ее значение можно считать случайной величиной. Сочетание типов функций принадлежности и количества термов нечетких переменных можно принять в качестве факторов, влияющих на значение случайной величины, а их влияние оценить с помощью дисперсионного анализа.
Дисперсионный анализ – это статистический метод анализа результатов наблюдений, зависящих от различных одновременно действующих факторов, с целью выбора наиболее значимых факторов и оценки их влияния на исследуемый процесс. С помощью этого метода устанавливаются изменения дисперсии результатов эксперимента при изменении уровней изучаемого фактора. Если дисперсии будут отличаться значимо, то следует вывод о значимом влиянии фактора на среднее значение наблюдаемой случайной величины [5].
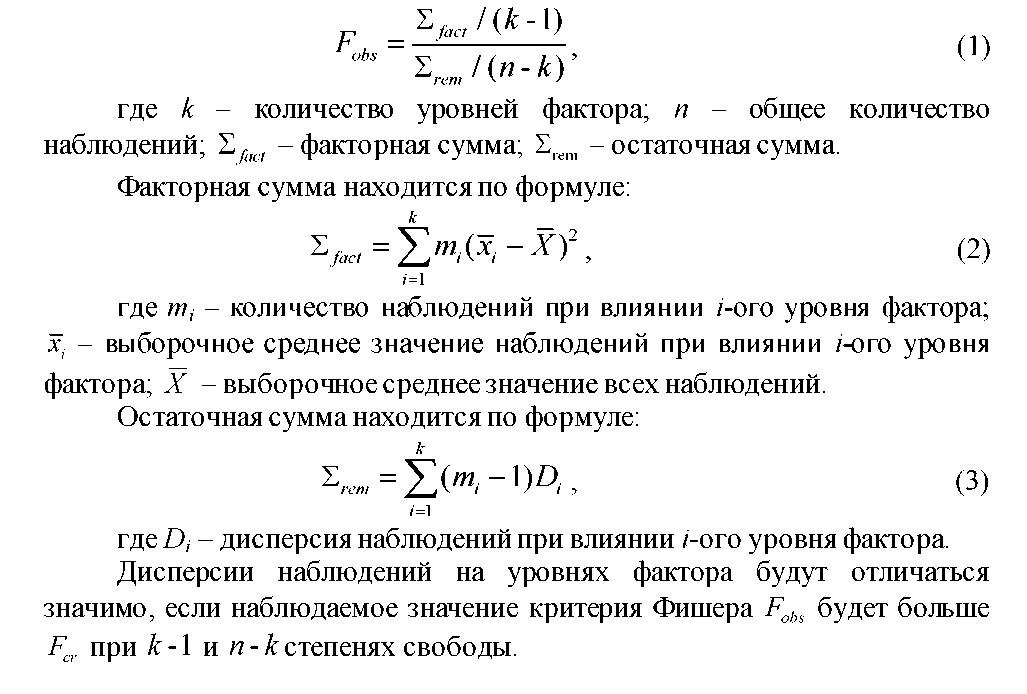
Влияние одного ф акто р а на дисперсию случайной величины оценивается с помощью критерия Фишера. Наблюдаемое значение критерия вычисляется по формуле
Таким образом, ставится задача определения оптимальной конфигурации терм-множеств входных и выходных лингвистических переменных нечеткого регулятора.
Исследование системы нечеткого управления перевернутым маятником
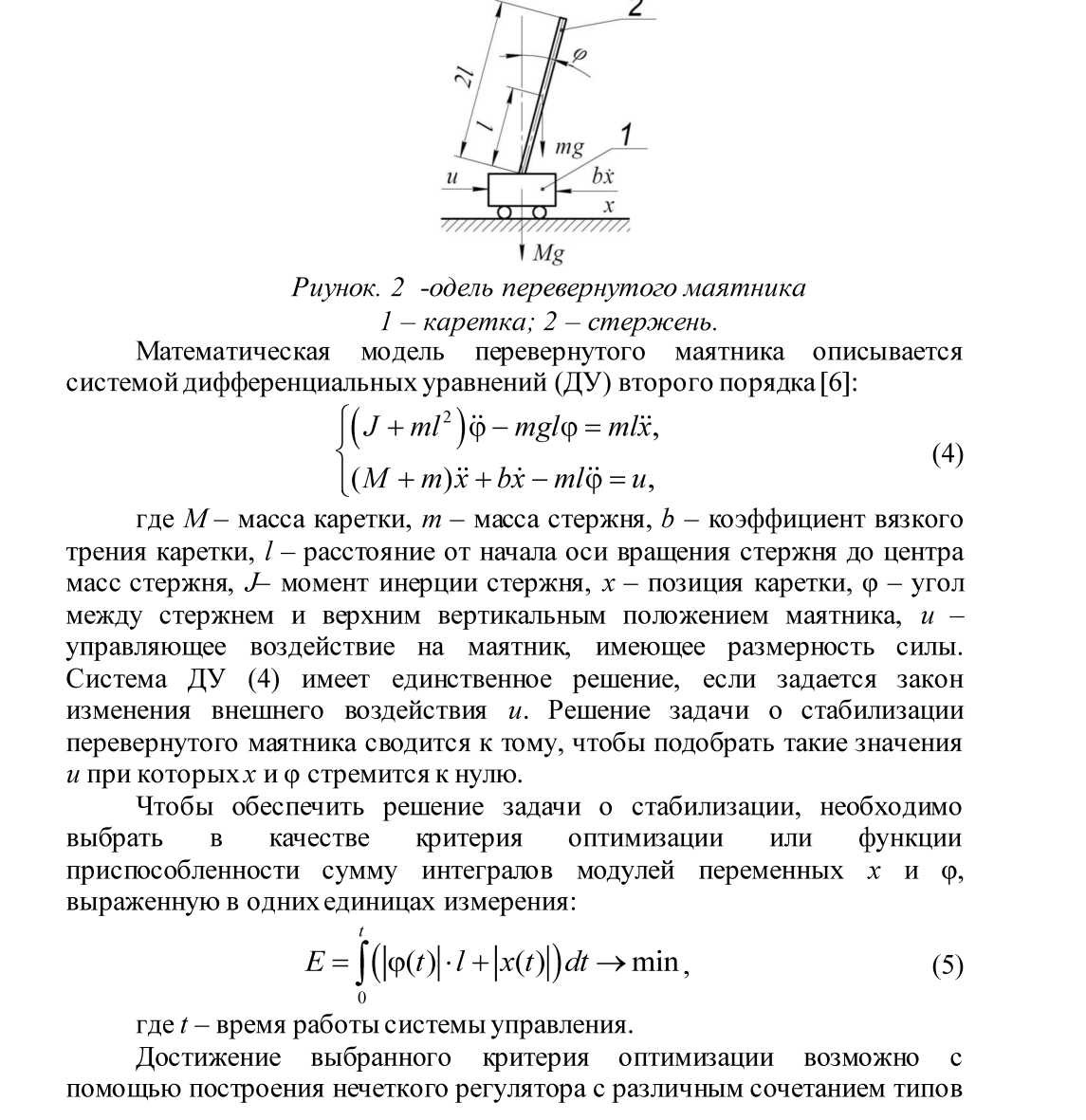
Рассмотрим влияние сочетаний типов функций принадлежности и количества термов нечетких переменных на точность работы системы управления перевернутым маятником. Перевернутый маятник представляет собой вертикальный стержень, установленный на каретке так, что центр масс находится выше точки опоры (рис. 2).
функций принадлежности . Некоторые возможные сочетания типов функций принадлежности , наиболее часто используемых при построении нечеткого регулятора, лингвистические переменные которого содержат по пять термов, представлены в таблице 1, а их графическое представление – на рис. 3.
Таблица 1 - Возможные сочетания типов функций принадлежности
|
№ |
Крайний левый терм |
Средние термы |
Крайний правый терм |
|
1 |
Трапецеидальная функция |
Треугольная функция |
Трапецеидальная функция |
|
2 |
Гладкая z-функция |
Функция Гаусса |
Гладкая s-функция |
|
3 |
Линейная z-функция |
Треугольная функция |
Линейная s-функция |
|
4 |
Гладкая z-функция |
Треугольная функция |
Гладкая s-функция |
|
5 |
Трапецеидальная функция |
Функция Гаусса |
Трапецеидальная функция |
|
6 |
Линейная z-функция |
Функция Гаусса |
Линейная s-функция |
Влияние типов функций принадлежности на точность работы нечеткого регулятора оценивается с помощью анализа выборочной совокупности значений функции приспособленности объемом 120 данных (по 20 данных на каждом уровне изучаемого фактора). Уровни изучаемого фактора – это возможные структуры нечеткого регулятора (рис.3). Статистические характеристики выборки для каждого уровня фактора представлены в таблице 2.
90
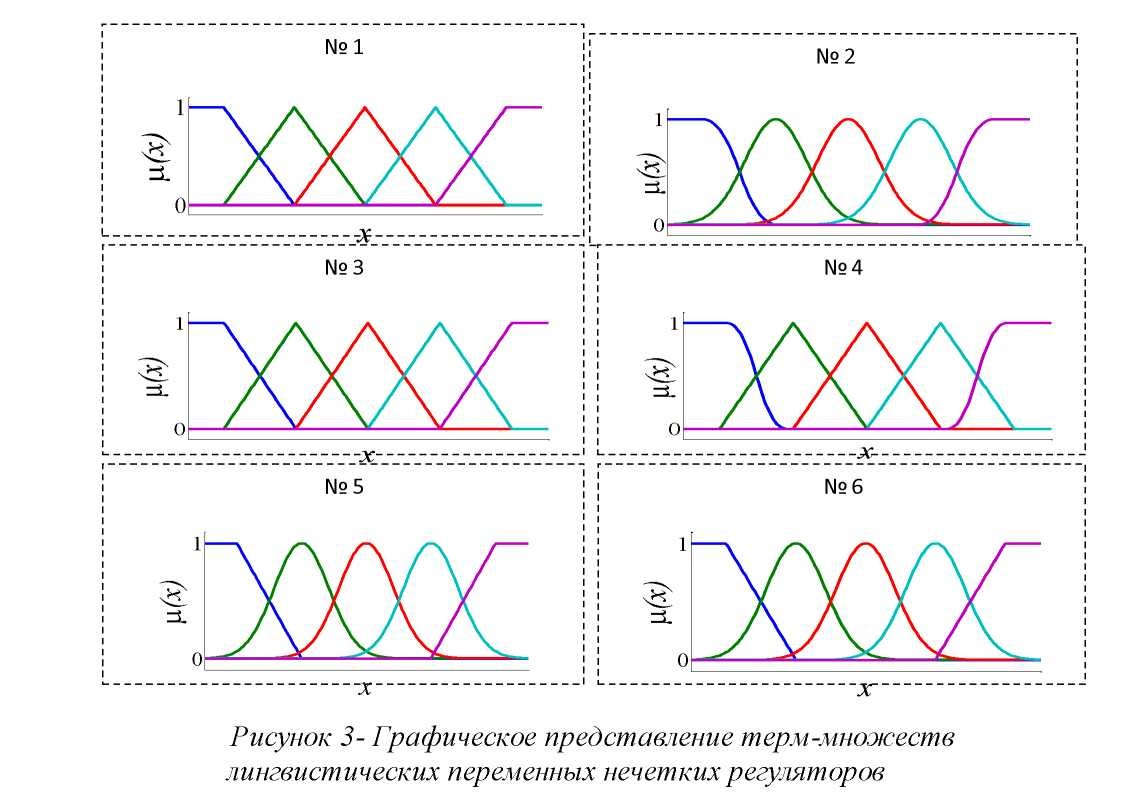
Таблица 2 -Статистические характеристики выборочных данных
|
Уровень фактора |
Среднее выборочное, Xi |
Дисперсия, Di |
Среднеквадратическое отклонение, Si |
|
1 |
0,5772 |
2,3053 |
1,5183 |
|
2 |
3,9266 |
23,4902 |
4,8467 |
|
3 |
0,5982 |
2,2924 |
1,5141 |
|
4 |
0,0596 |
0,0083 |
0,0909 |
|
5 |
5,9244 |
139,5944 |
11,8150 |
|
6 |
6,8031 |
108,0242 |
10,3935 |
Факторная сумма выборочных данных составляет 883,15, а остаточная сумма - 5238,58. Наблюдаемое значение критерия Фишера согласно (1) Fobs = 3,8447. Критическое значение критерия Фишера с 5 и 114 степенями свободы для уровня значимости 0,95, Fcr = 2,2939. Исходя из того, что наблюдаемое значение критерия Фишера больше критического значения, можно сделать вывод о существенном влиянии исследуемого фактора на случайную величину. Следовательно, дисперсионный анализ представленных данных доказывает влияние типов функций принадлежности на точность работы нечеткого регулятора.
Значимость влияния количества термов, описывающих нечеткие переменные, на точность работы нечеткого регуляторов можно оценить с помощью анализа выборочной совокупности из значений критерия оптимизации для определенной структуры нечеткого регулятора. Выборочная совокупность, созданная для данного анализа, содержит значения критерия оптимизации для нечеткого регулятора со структурой № 4 (рис. 3) объемом 100 данных (по 20 данных на каждом уровне изучаемого фактора). Уровнями изучаемого фактора служит количество термов лингвистических переменных нечеткого регулятора. Статистические характеристики выборки для каждого уровня фактора представлены в таблице 3.
Таблица 3 -Статистические характеристики выборочных данных
|
Уровень фактора |
Среднее выборочное, xi |
Дисперсия, Di |
Среднеквадратическое отклонение, Si |
|
1 |
2,5305 |
51,2953 ¯ |
7,1621 |
|
2 |
0,4706 |
0,6918 |
0,8318 |
|
3 |
0,0596 |
0,0083 |
0,0909 |
|
4 |
0,2980 |
0,1027 |
0,3205 |
|
5 |
0,8837 |
2,1638 |
1,4710 |
Факторная сумма выборочных данных составляет 77,97, а остаточная сумма - 1030,98. Наблюдаемое значение критерия Фишера Fobs =1,7946 . Критическое значение критерия Фишера с 4 и 95 степенями свободы для уровня значимости 0,95, ₣крит=2,4675. Исходя из того, что наблюдаемоезначение критерия Фишера меньше критического значения, можно сделать вывод об отсутствии влияния исследуемого фактора на случайную величину. Следовательно , количество термов лингвистических переменных не влияет на точность работы нечеткого регулятора.
Вывод
Исследование влияния структуры терм -множеств лингвистических переменных нечеткого регулятора на точность его работы показало, что для улучшения качества функционирования системы управления необходимо рационально выбирать сочетания типов функций принадлежности, а не увеличивать количество термов, что позволит значительно сократить время работы процедуры построения нечеткого регулятора. Высокой точностью работы системы управления обладает нечеткий регулятор со следующей структурой: крайний левый терм описывается гладкой z-функцией; средние термы - треугольной функцией и крайний правый терм - гладкой s-функцией.
Работа частично поддержана грантами РФФИ 1 1-07-00245-а и 12-0713 1 16-офи_м_РЖД.
ЛИТЕРАТУРА
- Штовба С. Д. Проектирование нечетких систем средствами MatL ab . - Москва: Горячая линия-Телеком, 2007. - С.288. ISBN 5-93517- 359-X.
- Чубукова И. А. Data Mining : учебное пособие. Москва: Интернет-университет информационных технологий; БИНОМ; Лаборатория знаний. - 2006. - С.382. (Серия «Основы информационных технологий»). IsBN 5-94774-522-4, 5-9556-0064-7.
- Cordon O., Herrera F., Hoffman F., Magdalena L. Genetic Fuzzy sistems: evolutionary tuning and learning of fuzzy knowledge bases. World scientific, 2001. - Р.462. IsBN 978-981-02-4016-5.
- В.С. Тарасян, И.В. Куликова. Разработка процедуры построения нечеткого регулятора и ее применение для управления движением перевернутого маятника // «Вестник Уральского государственного университета путей сообщения», 2013. - № 1(17).- С. 34-42.
- Кобзарь А. И. Прикладная математическая статистика. Для инженеров и научных работников. - Москва: ФИЗМАТЛИТ, 2006. - С.816. - IsBN 5-9221-0707-0.
- Бесекерский В.А., Попов Е.И. Теория систем автоматического управления - Изд. 4-е, перераб. и доп. - Санкт-Петербург: Изд-во «Профессия», 2003. - С.752.