Рассмотрены варианты применения системы спутниковой навигации с целью обеспечения безопасности движения поездов, а также планирование и организация процесса проектирования программного обеспечения.
Отражены вопросы перспективы развития спутниковых систем навигации, слежения за движением поездов и создания центров диспетчерского управления в Республике Казахстан.
Радикальная перестройка системы управления экономикой - одно из важнейших направлений программы реформ, проводимых в Казахстане. Особое значение эта проблема имеет для предприятия, положение которого в рыночной экономике меняется коренным образом, вынуждая сформировать у себя систему управления, которая обеспечила бы ему высокую эффективность работы, конкурентноспособность и устойчивость положения на рынке. Это необходимо для доказательства эффективности построения и реализации собственной модели развития нашего государства. Принятая в мае 2003 года «Стратегия индустриально- иновационного развития РК на 2003-2015 годы» создает условия для дальнейшего развития конкурентоспособной экономики и индустрии высоких технологий [1].
Стратегия определяет приоритетные направления государственной политики до 2015 года, и представляет собой совокупность политикоэкономических и организационно-правовых мер, принципов развития транспортной инфраструктуры и транзитной политики, призванных обеспечить комплексность и единство транспортной системы.
Существенное повышение эффективности работы железнодорожного транспорта становится возможным только при одном условии - разработке и внедрении в практику организации движения поездов интенсивных технологий, базирующихся на современной электронной технике [2].
Тема статьи связана с отраслевой комплексной программой «Разработка и внедрение ресурсосберегающих технологий на железных дорогах Казахстана», а также со «Стратегией вхождения Казахстана в число 50-ти наиболее конкурентоспособных стран мира». Учитывая важность вышеизложенного, вопросы совершенствования показателей работы напольных и постовых устройств дистанции сигнализации и связи является актуальной [3].
В настоящее время в мире эксплуатируются множество наземных, воздушных, транспортных средств и морских судов, необходимость использования которых обусловлена развитием экономики. Приведены статистические данные, в соответствии с которыми, основными производственными процессами на транспорте считаются: перевозка грузов и пассажиров, а также процессы по техническому обслуживанию и ремонту самих транспортных средств [4].
Одной из основных задач на транспорте является безаварийная и безопасная перевозка грузов и пассажиров. Увеличение скоростей движения транспортных средств, дальности перевозок, количества перевозимых грузов, освоение новых территорий континентов и акваторий, появление принципиально новых транспортных средств и способов управления являются основными факторами, которые делают исследования в области безопасности перевозок актуальными. Проведённый анализ современных систем обеспечения безопасности на транспорте показал существование резервов повышения качества перевозок путём контроля ответственных параметров подвижных объектов.
Существенным аспектом безопасного движения поездов является интервальное регулирование движение поездов. В условиях постоянно возрастающей плотности движения поездов на железной дороге необходимо использование современной надёжной системы интервального регулирования движения. В рамках проводимого исследования разработана полезная модель [5], решающая данную задачу с применением современных технологий.
Система интервального регулирования движения поездов (СИРДП) относится к области железнодорожной автоматики, и может быть использована на локомотивах, моторвагонных подвижных составах с целью повышения безопасности регулирования движения поездов, а также в системах интервального регулирования с использованием радиоканала.
За прототип были приняты существующие системы интервального регулирования движения поездов использующие спутниковые системы навигации.
Недостатком существующих систем является отсутствие возможности контроля целостности состава во время движения и определения скорости движения и местоположения отцепа в случае расцепки поезда.
Этот недостаток снижает надёжность и безопасность управления движением поездов.
Сущность разработки состоит в определении координат начала и конца состава без участия станционных устройств посредством применения комплексного локомотивного устройства безопасности (КЛУБ); в определении оптимального скоростного режима локомотива с учётом расстояния до препятствия и контроле его соблюдения; в определении минимально допустимого межпоездного интервала с целью повышения интенсивности движения; в расчёте фактической скорости движения поезда по данным от приёмника сигналов спутниковых радионавигационных систем; в возможности принятия решения об экстренном торможении, в возможности взаимодействия КЛУБ с системой автоматического управления тормозами (САУТ), в возможности контроля целостности поезда путём организации дополнительного радиоканала (рисунок 1).
При использовании системы интервального регулирования движения поездов достигается непрерывный контроль местоположения поезда с заданной точностью, увеличение интенсивности движения за счёт более четкого, в сравнении с системами интервального регулирования
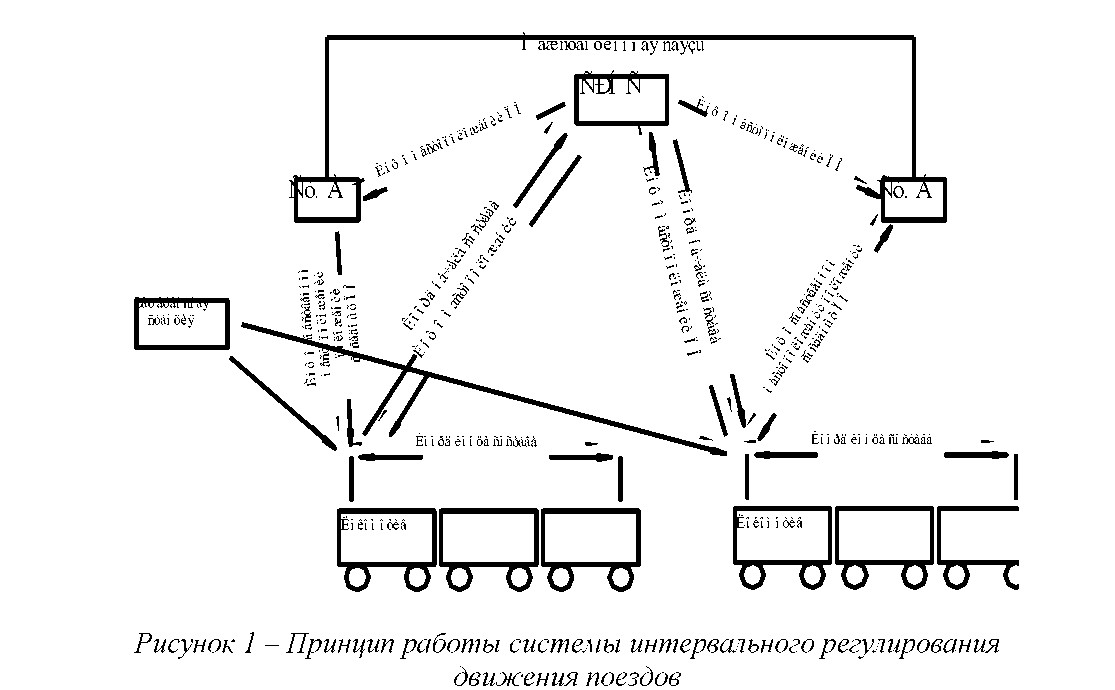
движения, построенных на основе напольных устройств автоматики, определения местоположения поездов, повышения безопасности движения путём непрерывного контроля межпоездного интервала, непрерывный контроль целостности подвижного состава [6].
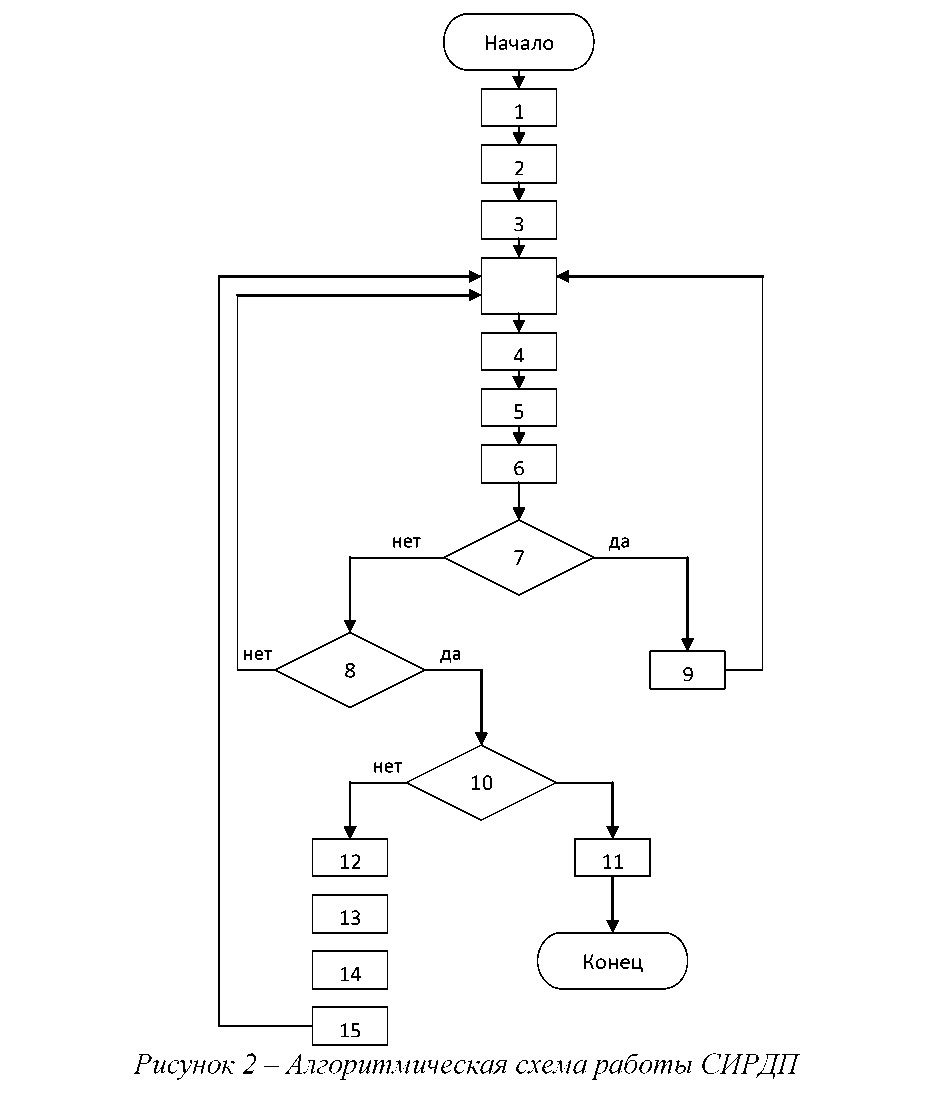
Алгоритмическая схема работы СИРДП представлена на рисунке 2. Пояснения к алгоритмической схеме функционирования СИРДП:
- диагностика программного комплекса и оборудования диспетчерского пункта;
- определение местоположения поездов;
- передача данных о местоположении поездов на локомотивы, станции, диспетчеру;
- определение расстояния между соседними поездами;
- расчёт допустимой скорости движения с учётом характера участка пути;
- передача данных на соседние локомотивы, ближайшие станции, диспетчеру;
- условный оператор: «межпоездные интервалы соответствуют норме»;
- условный оператор: «повторная проверка данных производилась»;
- движение разрешено с прежней скоростью или большей;
- условный оператор: «поезд останавливается на станции»;
- исключение поезда из системы;
- определение поезда, которому необходимо уменьшить скорость или остановиться;
- вычисление необходимой интенсивности торможения;
- сигнал об опасном сближении машинисту и диспетчеру;
- сигнал о торможении на САУТ.
Система интервального регулирования движения поездов решает задачу повышения безопасности и интенсивности движения путём непрерывного контроля местоположения поездов, контроля межпоездных интервалов и целостности составов [7].
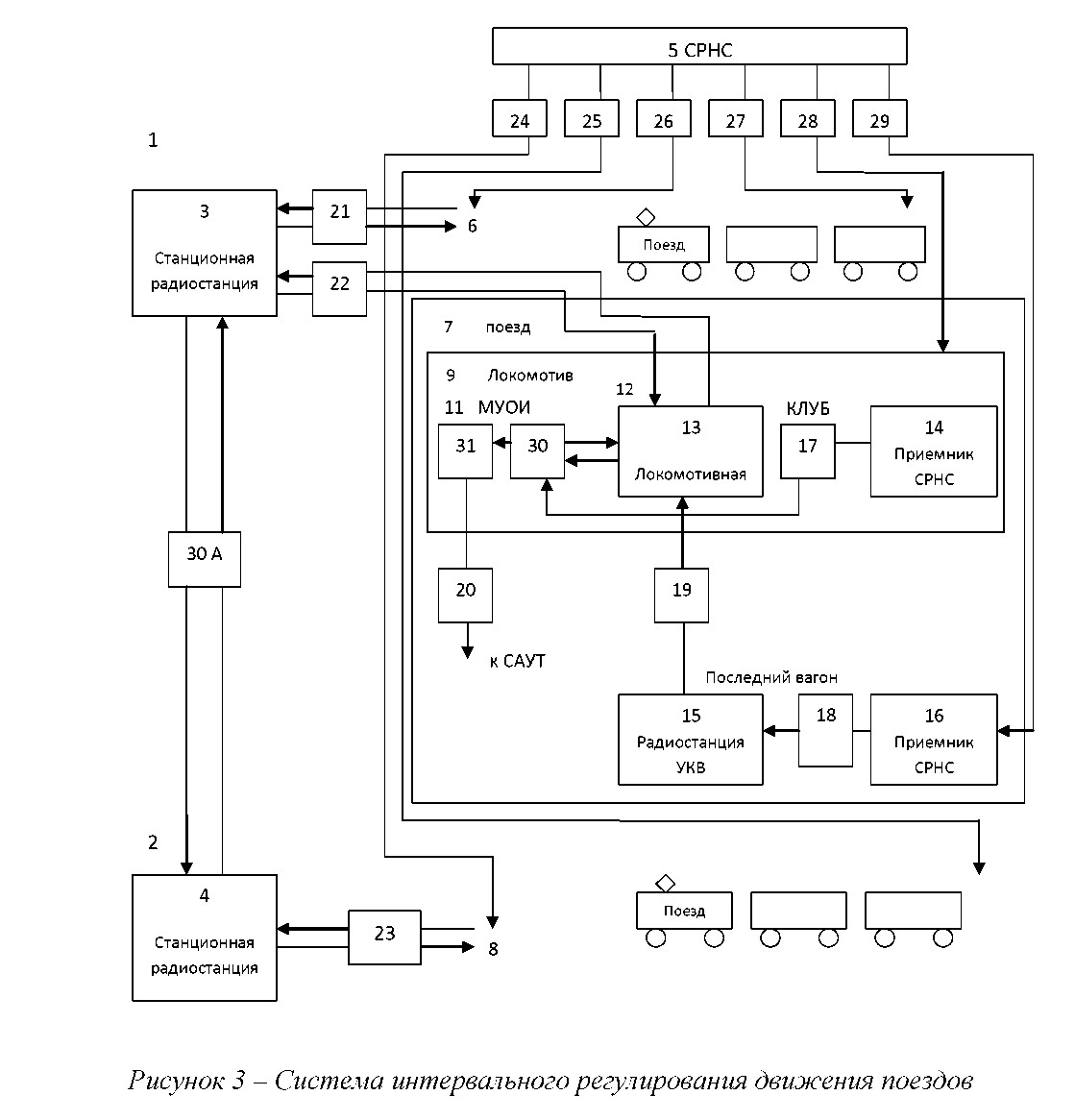
На рисунке 3 представлена структурная схема предлагаемой системы интервального регулирования движения поездов, состоящая из железнодорожных станций – 1, 2; спутниковой радионавигационной системы – 5; железнодорожных составов – 6, 7, 8.
На железнодорожных станциях – 1, 2 установлены станционные радиостанции - 3, 4. Посредством радиостанций – 3, 4 организованы выделенные радиоканалы 34, 35, 40, 41 для получения и передачи информации о местоположении железнодорожных составов – 6, 7. Передача информации о местоположении железнодорожных составов – 6, 7 между железнодорожными станциями – 1, 2 производится с использованием проводных каналов межстанционной связи – 30.
На железнодорожных составах – 6, 7, 8 установлено следующее идентичное оборудование: на локомотиве – 9: микропроцессорное устройство обработки информации – 11, включающее модуль сравнения скоростей – 30 и модуль контроля безопасности – 31; комплексное локомотивное устройство безопасности – 12, включающее поездную радиостанцию - 13, приёмник спутниковых навигационных сигналов - 14; на последнем вагоне – 10 установлена радиостанция УКВ диапазона – 15; приёмник спутниковых навигационных сигналов – 16.
Все устройства, входящие в систему интервального регулирования движения поездов, начинают работать сразу после включения питания.
Перед каждой поездкой в микропроцессорное устройство обработки информации – 11 заносят параметры движения подвижного состава, необходимые для работы системы.
35
Во время движения подвижного состава - 7 приёмники спутниковых навигационных сигналов - 14, 16 расположенные на локомотиве - 9 и последнем вагоне - 10 соответственно, принимают навигационные сигналы - 28, 29 спутниковой радионавигационной системы - 5. Непосредственно от приёмника спутниковых навигационных сигналов - 14. Информация - 17 о скорости движения и местоположении локомотива - 9 поступает в модуль сравнения скоростей - 30 микропроцессорного устройства обработки информации - 11, где преобразуется и передаётся в модуль контроля безопасности - 31. Информация - 18 о скорости движения и местоположении последнего вагона поезда - 10, от приёмника спутниковых навигационных сигналов - 16 поступает в радиостанцию СВЧ диапазона - 15, где преобразуется и в виде радиосигнала - 19 передаётся на локомотивную радиостанцию - 13, где происходят обратные преобразования сигнала и информация поступает в модуль сравнения скоростей - 30. В модуле контроля безопасности - 31 происходит сравнение данных полученных от приёмников спутниковых навигационных сигналов - 14, 16. Несоответствие информации о скорости движения, полученной с приёмников 14, 16, будет свидетельствовать о расцепке железнодорожного состава во время движения и на систему автоматического управления тормозами подаётся сигнал об экстренном торможении - 20.
Информация о параметрах движения подвижного состава - 7 из микропроцессорного устройства обработки информации - 11 поступает в поездную радиостанцию - 13, где преобразуется и передаётся на станционную радиостанцию - 3 в виде радиосигнала - 22 по выделенному каналу.
Данные о параметрах движения (местоположении и скорости движения локомотивов и последних вагонов) железнодорожных составов - 6, 8 поступают в виде спутниковых навигационных сигналов - 24, 25, 26, 27 на поездные приёмники спутниковых навигационных сигналов, анализируются аналогичным образом и поступают в виде радиосигналов - 21, 23 на станционные радиостанции - 3,4.
По выделенным каналам межстанционной проводной связи - 30 происходит обмен данными о параметрах движения железнодорожных составов - 6, 7, 8. Информация о параметрах движения впереди идущего и последующего железнодорожных составов преобразуется в станционной радиостанции - 3 и в виде радиосигнала - 22 поступает на поездную радиостанцию - 13, откуда передаётся в микропроцессорное устройство обработки информации - 11.
В модуле контроля безопасности - 31 микропроцессорного устройства обработки информации - 11 производится вычисление межпоездных интервалов относительно впереди идущего и последующего железнодорожных составов. На основании значений вычисленныхмежпоездных интервалов, параметров участка железнодорожного пути принимается решение о движении с прежними параметрами или экстренном торможении железнодорожного состава [8].
Разработанная система интервального регулирования движения позволит увеличить интенсивность движения на дороге, что в свою очередь позволит существенно увеличить экономическую эффективность перевозок железнодорожных перевозок.
Вывод. В настоящее время на железных дорогах Казахстана не представляется возможным отказаться от напольных устройств СЦБ и полностью перейти на системы интервального регулирования движения построенных на основе спутниковых систем навигации в виду возможности непрогнозируемых сбоев в работе последних. Однако, применение СИРДП совместно с напольными устройствами СЦБ позволит обеспечить увеличение интенсивности движения, сохраняя при этом высокие показатели надёжности работы железнодорожного транспорта.
ЛИТЕРАТУРА
- Послание Президента страны народу Казахстана «Казахстан 2030: процветание, безопасность и улучшение благосостояния всех казахстанцев». - Астана: Атамура, 1997. - 32 с.
- Указ Президента РК. Стратегия индустриально-инновационного развития Республики Казахстан на 2003-2015 годы: утв.17.05.2003, №1096. - Астана: Атамура, 2003. - 41с.
- Указ Президента РК. Транспортная стратегия Республики Казахстан до 2015 года: утв. 11.04.2006, №86. - Астана: Атамура, 2006. - 62с.
- Трифанов В.Н. Инвариантный статистический анализ и управление в транспортных системах // Трифанов В.Н. – Санкт-Петербург: Элмор, 2003. – 192 с.
- Розенберг В.Е. Применение спутниковой навигации на железнодорожном транспорте [Электрон. ресурс] - URL: http://www.zdt- magazine.ru/publik/techsredstva/2008/okt08/ko smo s .htm.
- Марюхненко B.C. Оценка эффективности навигационного обеспечения подвижных объектов с учетом пространственных искажений и нестационарности рабочих зон радионавигационных систем // Электромагнитные волны и электронные системы - 2007. - №2. - С.65-67.
- Харисов В.Н., Перов А.И., Болдин В.А.. Глобальная спутниковая радионавигационная система ГЛОНАСС. - Москва: ИПРЖР, 1998. - 400 с.
- Бородакий Ю.В. Основы теории систем управления (Исследование и проектирование) // Ю.В. Бородакий, Ю.Г. Лободинский. - Москва: Радио и связь, 2004. – 256 с.