В области моделирования и управления системами с распределенными параметрами перед исследователями стоит рад задач, решение которых имеет важное теоретическое и прикладное значение и требует глубокой научной проработки. Одной из таких задач является проблема проектирования оптимальных режимов и систем управления технологическими установками.
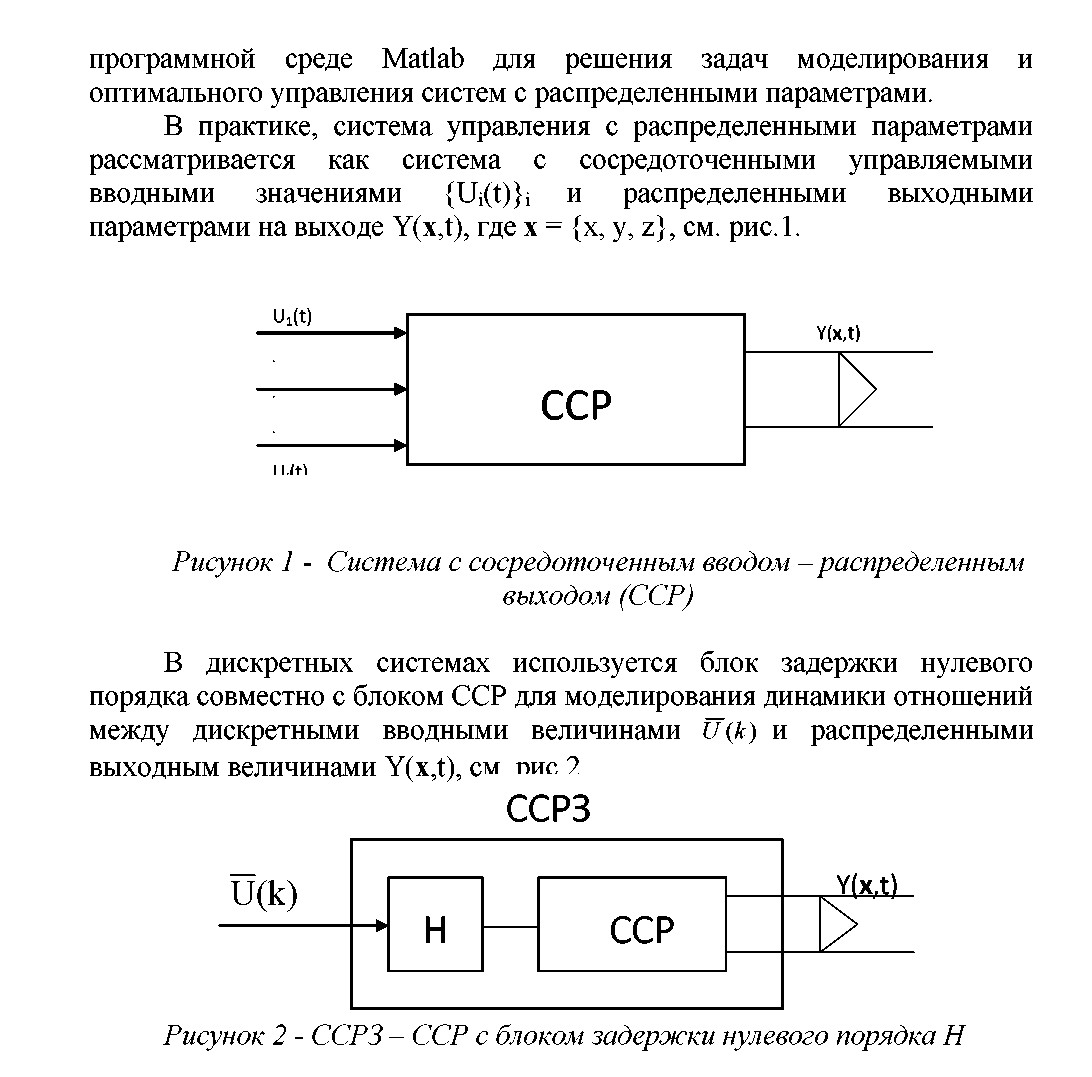
В настоящее время нет единой обобщающей модели, позволяющей рассматривать технологические процессы тепло-массобомена в широком диапазоне измерений начальных и граничных условий с учетом различных возмущавших воздействий и оценивать статические и динамические характеристики всего технологического процесса. Создание такой модели часто тормозится отсутствием нестационарным режимам при различных возмущениях и т.д.
Первые работы по исследованию систем управления с распределенными параметрами были изданы в 60х годах прошлого века, в частности работы П.К.С. Ванга «Управление систем с распределенными параметрами» (1964 г.) и А.Г. Бутковского «Оптимальное управление систем с распределенными параметрами» (1965 г.). В дальнейшем было опубликовано немало значимых работ основанных на аналитических методах решений уравнений с частными производными. В связи с развитием информационных технологий были достигнуты новые горизонты в численных методах решений систем с распределенными параметрами в 3-х мерных сложных областях определения форм, который создал бум в численном анализе динамики технологических процессов производства. На основе этого создано новое направление программного обеспечения для симуляции технологических процессов (таких как ANSYS, FLUENT, STAR-CD, и др.), среды научного моделирования (COMSOL Multiphisics), виртуальные среды испытаний и анализа процессов тепло-массообмена (ESI Group, MODFLOW, и др.). В данной статье мы рассмотрим возможности приложений DPS tool и PDE tool в
Для декомпозиции динамики ССРЗ на временные и пространственные компоненты использованы отдельные ступенчатые возмущения с распределенными параметрами {HHi(x,k)}i. Были определены дискретные передаточные функции для отельных ступенчатых возмущений с максимальной амплитудой, {HHi(xi,k)}i, в точках {xi}i: {SHi(xi,z)}i как временной компонент динамики ССРЗ. Как пространственный компонент динамики ССРЗ было рассмотрено приведенное частичное ступенчатое возмущение в установившемся состоянии {,HHRi(x, ∞ )}i, где {HHRi(x, ∞ )}=HHi(x, ∞ )/ HHi(xi, ∞ )}i. Характеристики с распределенными параметрами ¦//I IR∣(x. ∞ )}i и {HHi(x,k)}i были получены с помощью пакета PDE tool в среде Matlab, которая использует метод конечных элементов для решения дифференциальных уравнений в частных производных. Передаточные
224
функции {SHi(xi,z)}i идентифицированы в приложении DPS blockset в среде Matlab.
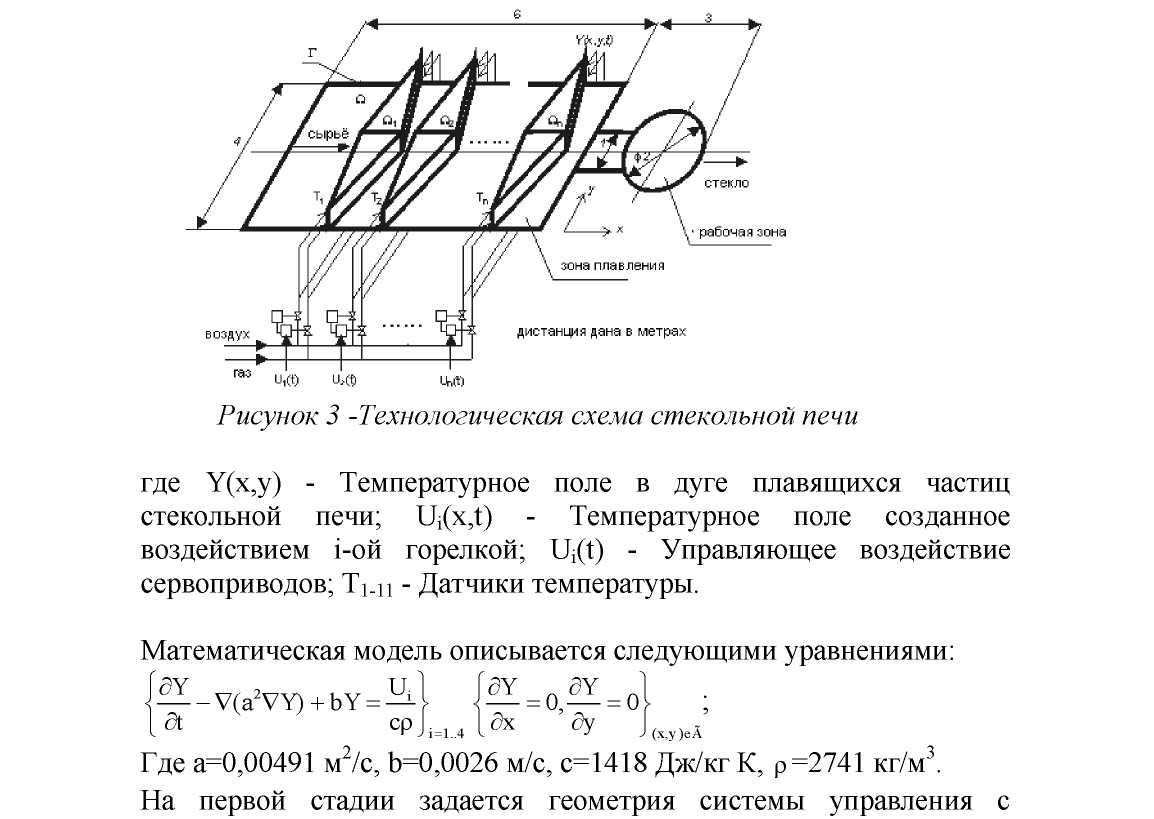
Рассмотрим пример процесса плавки стекла в стекольной печи, где управляемыми вводными значениями являются потоки газа на индивидуальную горелку в печи, а управляемой переменной является температурное поле внутри стекольной печи. Динамика системы дана методом конечных элементов численной структуры печи Ω , соответствующая дифференциальному уравнению в частных производных параболического типа с передаточными функциями горелок: SAi(s), SGi(s) и Ti(x,y), где Ti(x,y) является блоком формирования i-ого числа распределенных вводов ((i=1-4)
Ниже приведена технологическая схема стекольной печи.
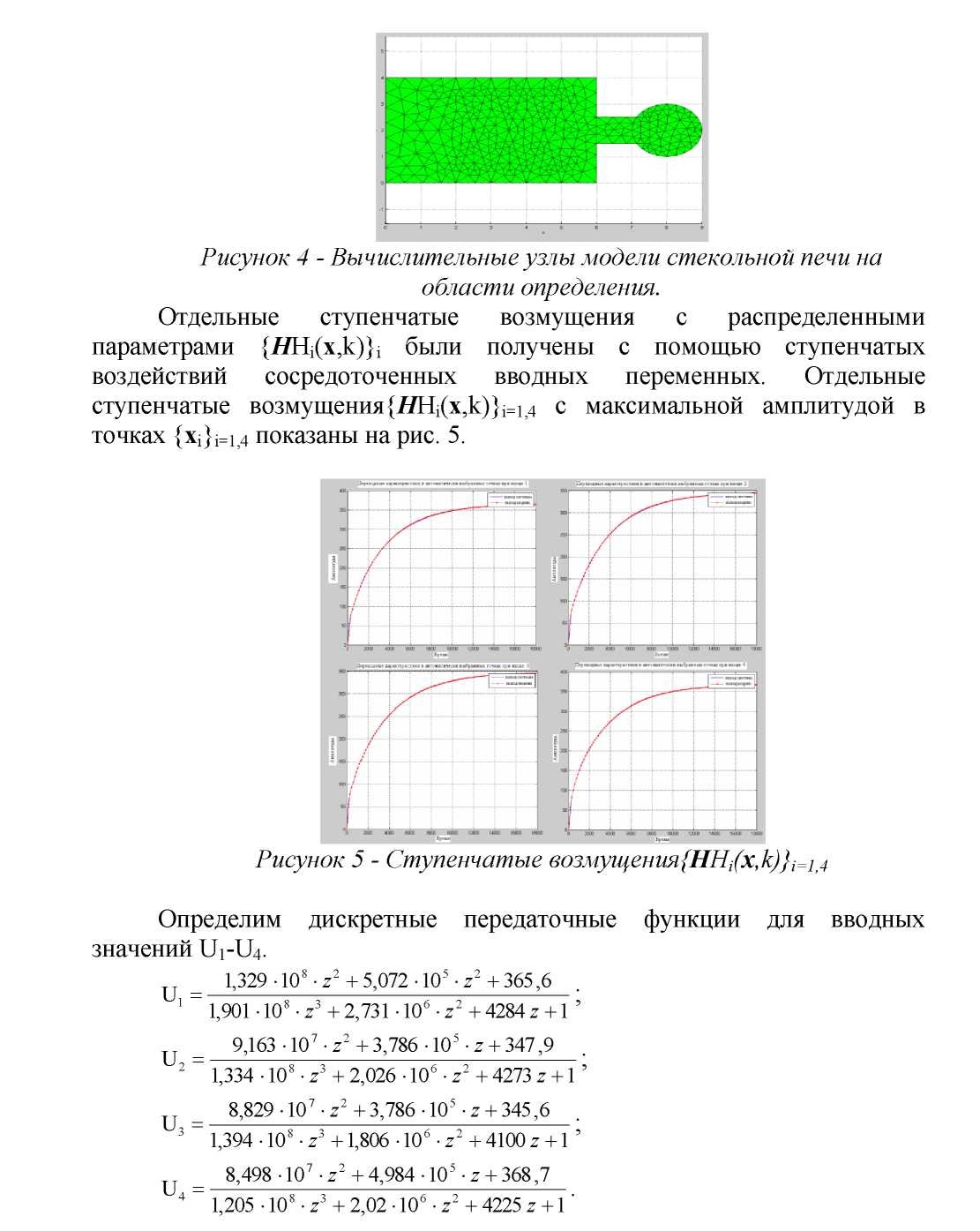
распределенными параметрами, которая задается вычислительными узлами или измеримыми точками на области определения системы и набором простых элементов представленных на этих точках геометрической декомпозиции. Вычислительные узлы модели стекольной печи на области определения показан на рис. 4.
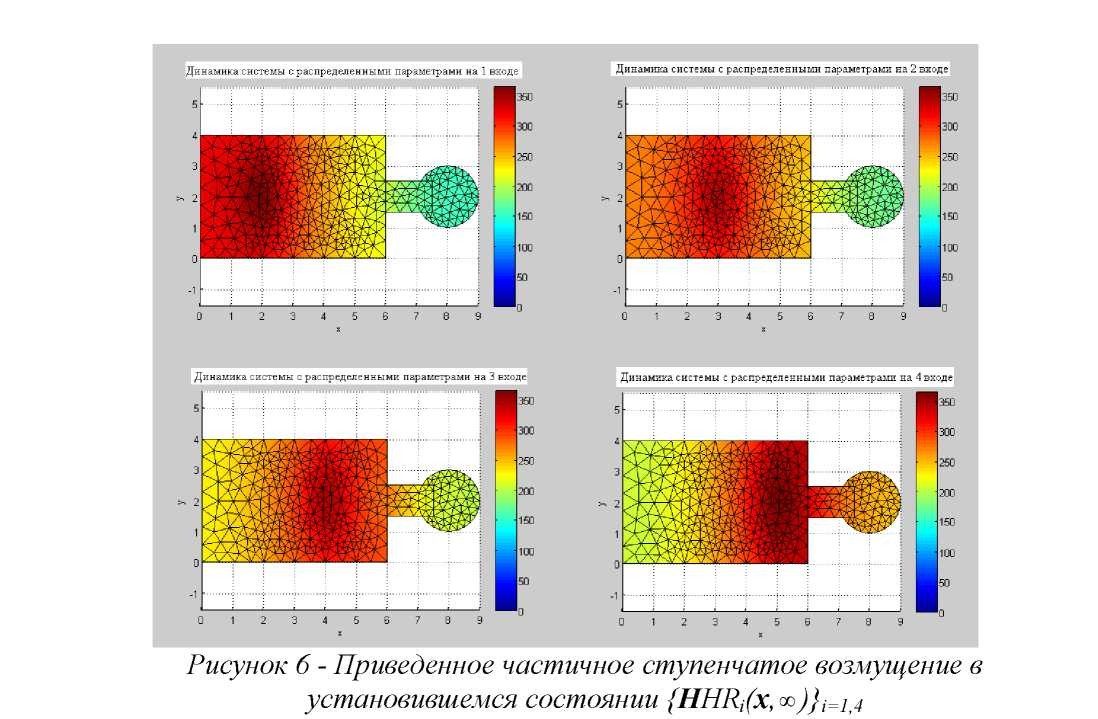
Далее определенно приведенное частичное ступенчатое возмущение в установившемся состоянии ¦//I IR∣(x,∞ ) //І Ii(x,∞ )ZHHi(xi,∞ )}i=1,4 которые являются пространственными компонентами динамики исследуемой системы.
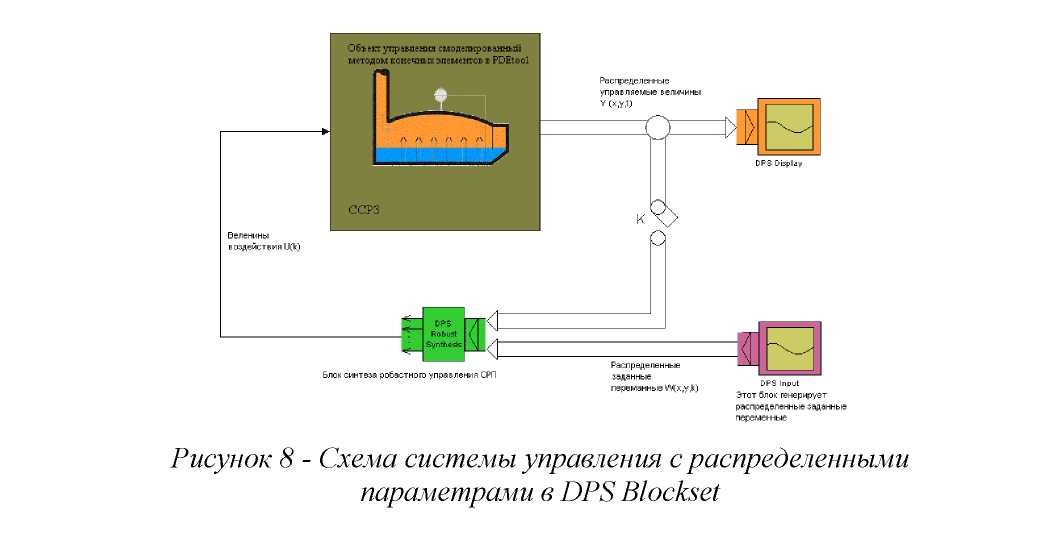
Рассмотрим синтез управления систем с распределенными параметрами реализованный в программном пакете DPS toolbox. Синтез управления основан на декомпозиции динамики на временной и пространственный компонент. Ниже приведена функциональная схема системы управления с распределенными параметрами, рис 7.

Пространственная часть синтеза управления решена как задача аппроксимации отклонения управления E(x,t) на группе временных компонентов динамики управляемой системы {HHRi(x, ∞ )}i. Вектор оптимальных параметров аппроксимации E(k) , который является вектором ошибки с сосредоточенными параметрами, вводиться в блок временного синтеза, где контроллеры {Ri(z)}i сделаны на основе временных компонентов динамики системы управления {SHi(xi,z)}i.
Представим схему системы управления созданной с помощью DPS Blockset в среде Matlab, рис.8.
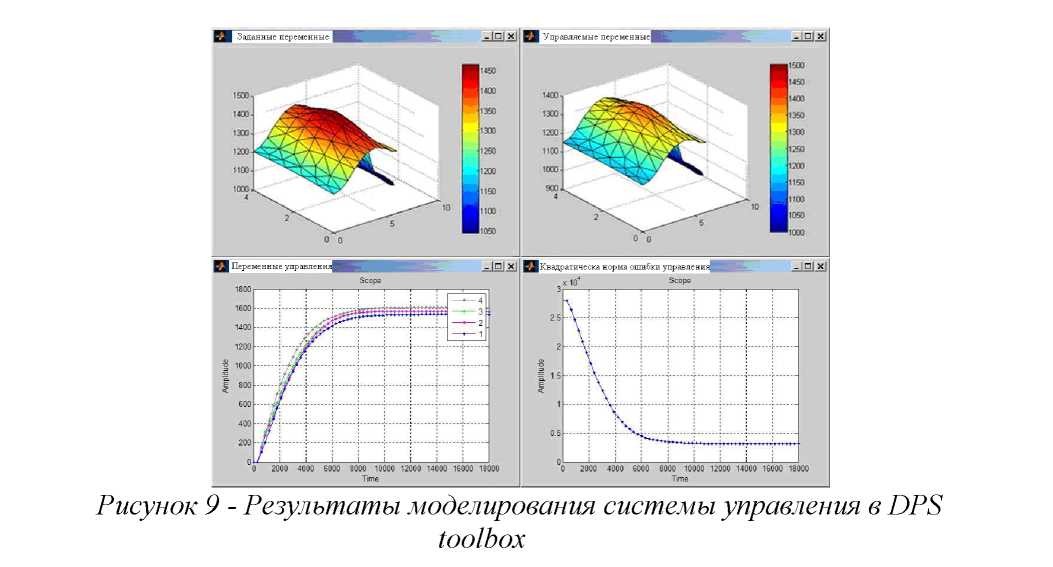
Далее мы можем получить результаты моделирования робастного управления температуры стекольной печи как системы с распределенными параметрами. Ниже приведены результаты моделирования соответствия заданных переменных и выходных переменных системы управления, а так же данные по векторам управления и квадратической нормы ошибки системы управления.
228
Как видно из полученных результатов мы имеем сильный пакет приложений для моделирования систем с распределенными параметрами, как PDE tool, а так же программу DPE tool для решения задач оптимального управления систем с распределенными параметрами.
Последние результаты развития науки позволяют использовать закон движения материи в обеих временных и пространственных областях в прикладной инженерии. Эти законы предлагают сложные методы аналитического моделирования, широкие возможности в измерении, видео тамографические методы, т.п. Тем не менее, действительно эффективное использование этой методологии может быть достигнуто только тогда, когда она рассматривается как система управления с распределенными параметрами, и дает возможность решить вопросы оптимизации.
По этой причине основным преимуществом DPE tool является то, что она предлагает инженерному обществу исследовать и использовать управляемое временное-пространственное движение материи с распределенными параметрами для создания оборудования нового тысячелетия.
Литература
- Бутковский А.Г. Оптимальное управление систем с распределенными параметрами. – М.: Наука, 1965.
- Бутковский А.Г. Характеристики систем с распределенными параметрами. – М.: Наука, 1965.
- Ванг П. Управление систем с распределенными параметрами // Достижения в системах управления: Теория и применения. – Нью-Йорк: Академик пресс, 1964.
- Нулко Г. Моделирование, управление и разработка систем с распределенными параметрами в Matlab. – Братислава: Дом изданий СТУ, 1998.