Аннотация
Рассмотрена задача построения цифро-аналогового преобразователя для многопараметрической системы управления электрохимическим формообразованием на базе платформы Arduino Mega-2560 с использованием программных возможностей пакета реального времени системы Matlab. Приведен результат моделирования предварительного преобразования входных сигналов предложенной системы управления.
Совершенствование конструкции изделия машиностроительного производства связано с необходимостью применения новых конструкционных материалов, обладающих особыми свойствами, и поэтому возникает ряд технологических проблем при обработке новых материалов или изготовлении изделий, форма поверхности которых и ее состояние не могут быть получены известными механическими методами. В настоящее время для решения этих технологических проблем нашли широкое применение электрохимические методы обработки, позволяющие обрабатывать материалы с высокими механическими свойствами без применения больших механических усилий и с применением инструментов, твердость которых значительно меньше твердости обрабатываемого материала.
Электрохимическая размерная обработка представляет собой процесс, в котором электрически проводящее обрабатываемое изделие растворяется в месте расположения электрода при подаче электролита и электрического тока. При этом
Принципы построения цифро-аналоговых 59
преобразователей для многопараметрических систем управления
на базе платформы ARDUINO MEGA 2560 для поддержания оптимального режима электрохимической размерной обработки (ЭХО) необходимо измерять, контролировать и регулировать одновременно несколько взаимосвязанных параметров процесса ЭХО.
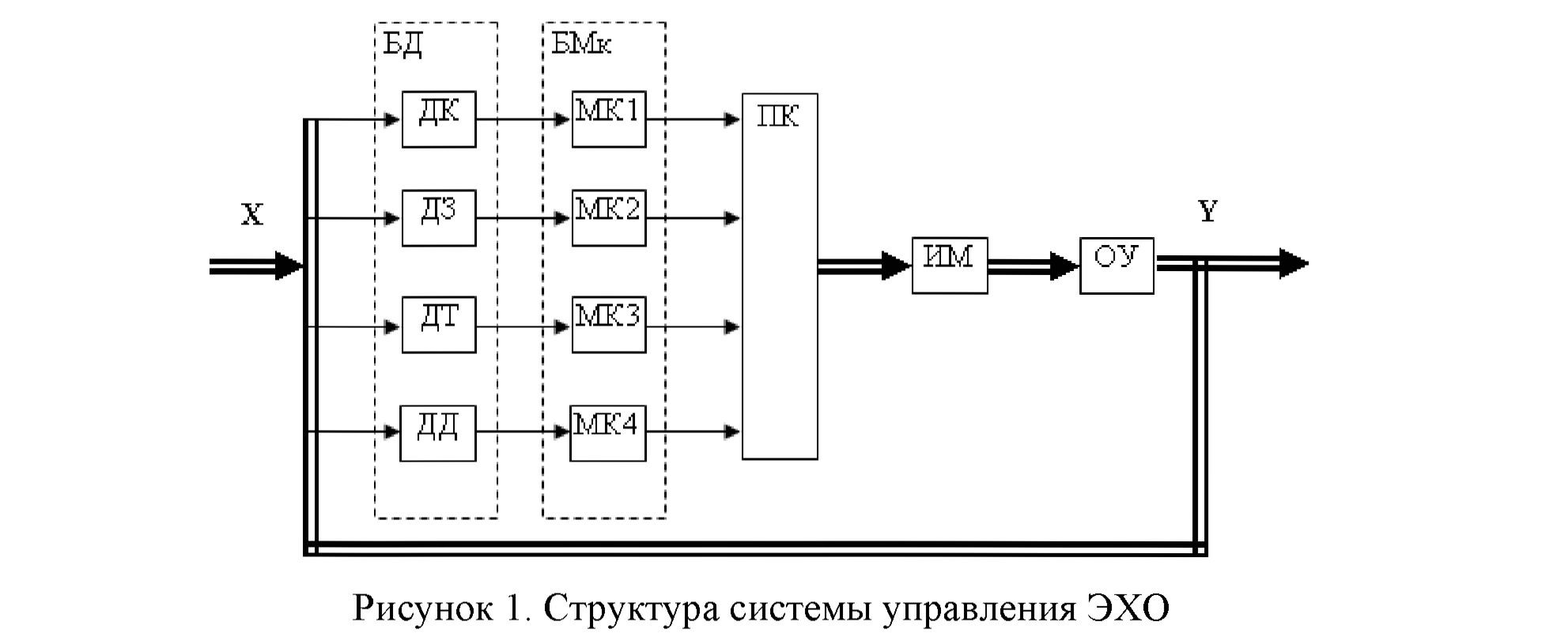
На рисунке 1 представлена структурная схема управления ЭХО с контролем величины зазора между электродом и обрабатываемым изделием, плотности тока в зазоре и давления в канале подачи электролита.
На рисунке 1 приняты следующие обозначения:
X - вектор заданных значений параметров управления;
Y - вектор измеренных значений параметров управления;
БД - блок датчиков;
ДП, ДЗ, ДТ, ДД - датчик горизонтального позиционирования электрода, датчик зазора, датчик тока, датчик давления соответственно;
БМк - блок микроконтроллеров;
MKl ч- МК4 - микроконтроллеры;
ПК - компьютер;
ИМ - исполнительный механизм (электромеханическая система перемещения электрода, управляемый источник тока, электрогидравлический насос для подачи электролита);
OY - объект управления (включает обрабатываемое изделие, электрод и электролит).
Предложенная структура должна обеспечивать стабилизацию или регулирования в заданных пределах перечисленных параметров процесса ЭХО.
Назначение микроконтроллеров - предварительная обработка сигналов (преобразование формы сигнала, цифровая фильтрация и т.д.), снимаемых с измерительных датчиков. Компьютер предназначен для реализации основного алгоритма электрохимической обработки. Такая разветвленная система (микроконтроллеры и компьютер) призвана обеспечить параллельное выполнение процессов управления и тем самым увеличить быстродействие системы.
C точки зрения совместимости, программирования и функциональности в качестве микроконтроллеров целесообразно применить ATMega-2560 на платформе Arduino [1, с. 6]. В этом случае можно использовать пакет Simulink системы Matlab [2, с. 25-30] и для программирования микроконтроллеров, и для реализации основного закона управления на компьютере.
Основной недостаток микроконтроллеров Atmel этой серии - отсутствие аналогового выхода, что ограничивает возможности создания полноценного основного алгоритма управления.
C цель устранения этого недостатка в данной статье предлагается программная реализация цифрового (в двоичном коде) и аналогового выходов на базе платы Arduino с микроконтроллером ATMega-2560 и визуального программирования пакета Simulink.
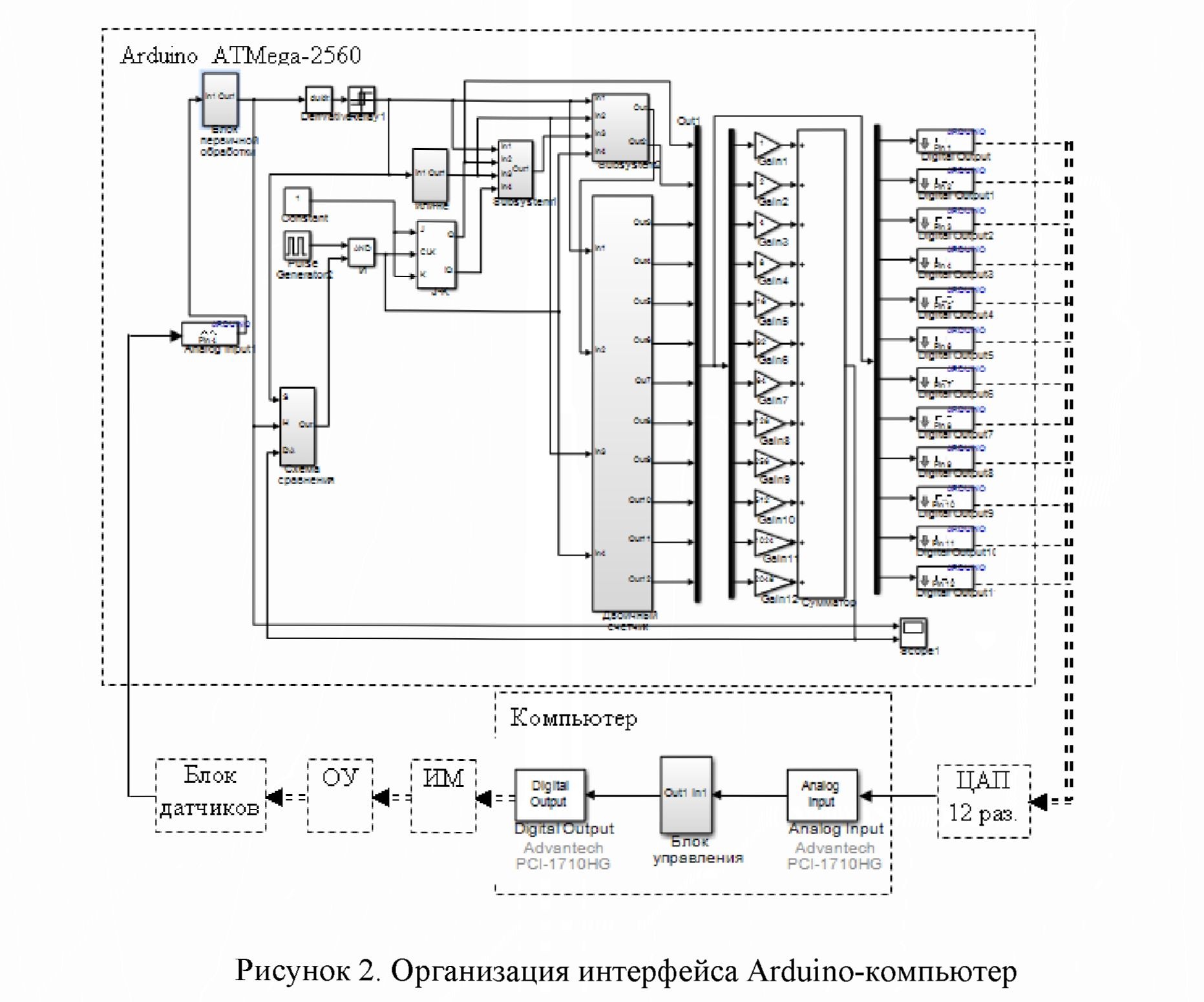
На рисунке 2 представлена организация интерфейса Arduino-компьютер в виде детализированной структуры управления ЭХО для одного канала включающая Simulink-модели записанные в память микроконтроллера ATmega2560 платформы Arduino Mega и в память компьютера.
Simulink-модель для платформы Arduino представляет собой блок первичной обработки (БПО) и аналого-цифровой преобразователь (АЦП), который включает: двоичный счетчик прямого и обратного счета, цифро- аналоговой преобразователь, состоящий из двенадцати усилителей и сумматора, устройство сравнения и дополнительные устройства сопряжения. Кроме того, в состав Simulink-модели входят блоки из пакета Simulink Support Package for Arduino Hardware: Analog Input и Digital Output, которые обеспечивают связь микроконтроллера AtMega-2560 с внешней средой.
Технология записи Simulink-модели для платформы Arduino включает несколько этапов. Для программирования необходимо плату подключить к
Принципы построения цифро-аналоговых 61
преобразователей для многопараметрических систем управления на базе платформы ARDUINO MEGA 2560 компьютеру с помощью кабеля USB. Затем необходимо произвести запуск модели из меню Tools/.. ./Run. В результате этих действий программа управления будет записана в память микроконтроллера AtMega-2560. После этого кабель USB уже можно отключить от платы Arduino, а запуск программы управления будет осуществляться от внешнего источника питания 9 В.
Simulink-модель записанная в память компьютера включает подсистему Блок управления, в которой реализуется основной алгоритм управления, и блоки пакета Real-Time Windows Target: Analog Input и Digital Output, которые обеспечили внешний интерфейс с помощью многофункциональной платы PCI- 1710HG [3, с. 56]. Дополнительно необходимо установить аппаратный двенадцатиразрядный ЦАП для связи платы Arduino с платой PCI-171OHG. Следует отметить, что связь между платами может быть организована непосредственно с помощью цифровых выходов платы Arduino и цифровых входов платы PCI-171OHG.
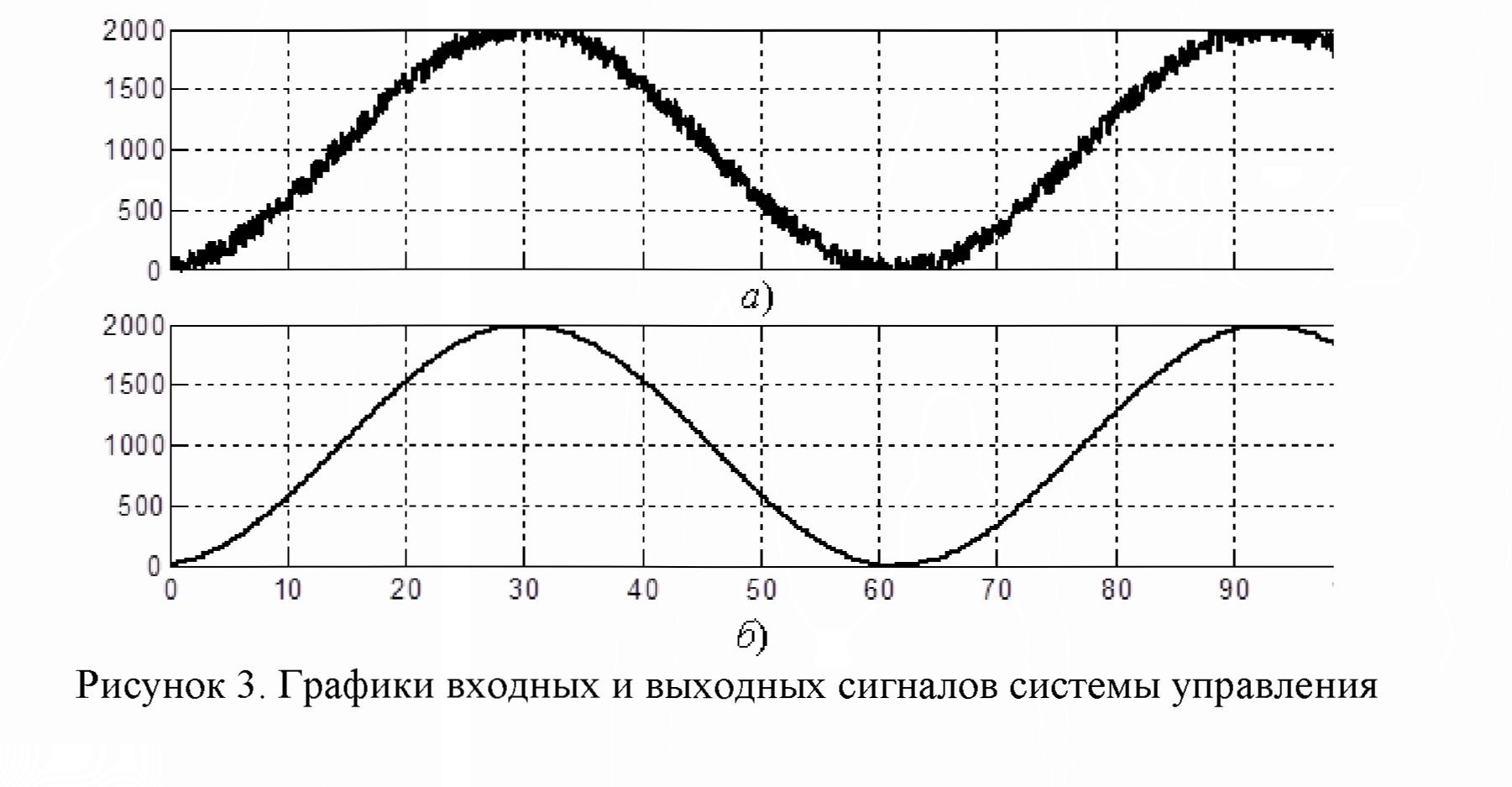
Для проверки работоспособности АЦП на вход блока первичной обработки были подключены параллельно соединенные модели источника синусоидального и случайного сигналов. Результат моделирования был записан на осциллографе Scope 1 и представлен на рисунке 3.
Осциллограмма на рисунке 3, а представляет зашумленный синусоидальный сигнал на входе БПО, а осциллограмма на рисунке 3, б - это сигнал на выходе цифро-аналогового блока, подвергшийся цифровой фильтрации в блоке БПО.
Таким образом, в настоящей статье предложен способ и показана возможность создания многопараметрической системы управления электрохимическим формообразованием с помощью пакета Simulink программной среды Matlab и функциональных возможностей платформы Arduino Mega-2560.
Литература:
- Соммер У. Программирование микроконтроллерах плат Arduino /Freeduino. - СПб.: БХВ-Петербург. 2012. - 256 с.
- Agus Kumiawan. Getting Started with Matlab Simulink and Arduino // PE Press; 1 edition (September 15. 2013) - 101 c.
- Дьяконов В., Круглов В. MalLab. Анализ, идентификация и моделирование систем. Специальный справочник. - СПб.: Питер, 2002. - 444 с.