Обзор основных видов шумов на спутниковых снимках и методов фильтрации
Введение
Возникновение шума обусловлено многочисленными факторами: тепловыми эффектами, сбоем детектора, взаимодействиями между электронными компонентами системы формирования изображения, ошибками дискретизации, ошибками передачи и др. Шумы на изображении появляются в самых разнообразных формах (рис. 1) и зачастую их сложно смоделировать, поэтому многие методы шумоподавления являются специальными, что, в принципе, удобно для разделения видов шумов по категориям и обобщения описательных моделей шумов.

Глобальный случайный и полосовой шумы
Полосовой шум Импульсный шум
Рис. 1. Различные виды шумов на спутниковых снимках
Так как большинство видов шумов возникает в самих детекторах или в электронных компонентах системы формирования изображения, их характеристики определяются в отдельных пикселах изображения или в пределах линий сканирования. Поэтому лучше попытаться устранить шум перед любой передискретизацией изображения, так как передискретизация «смажет» шум в соседние пикселы и линии, что в дальнейшем только затруднит фильтрацию.
Характеристика шума в детекторе
Идеальный детектор должен действовать как преобразователь интенсивности излучения в ток или, что эквивалентно, как преобразователь падающих фотонов в электроны. Но в действительности в детекторе возникает множество шумов. Модель шумов в детекторе представлена на рис. 2.
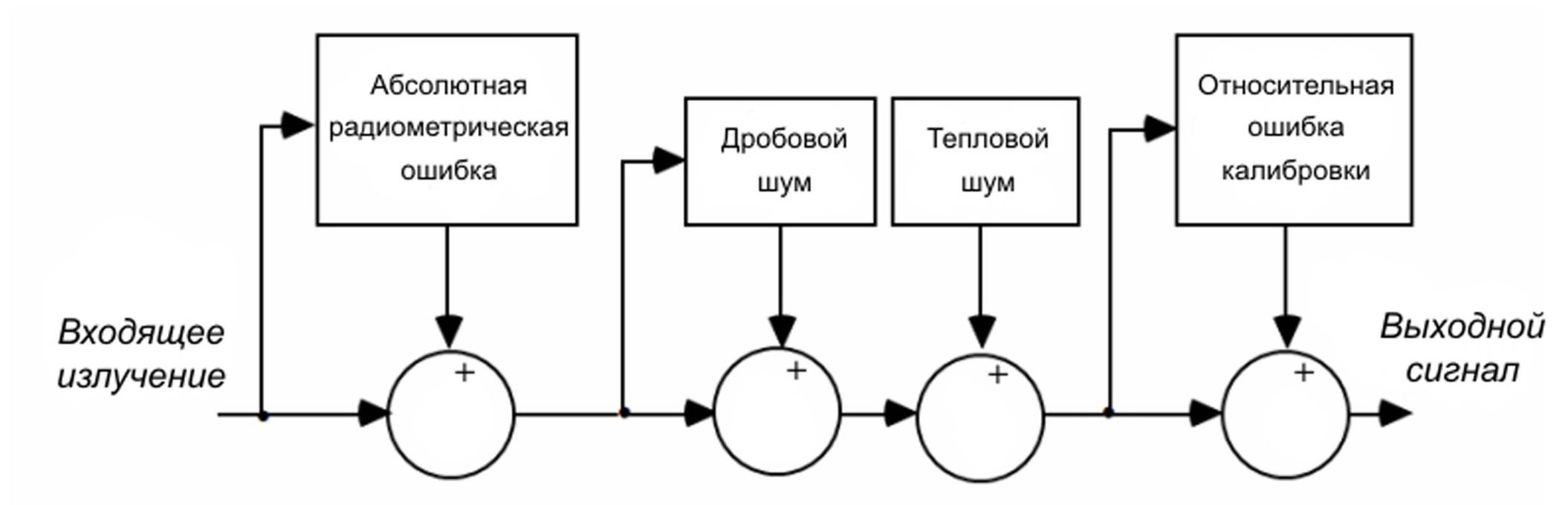
Рис. 2. Модель шумов в детекторе
Дробовой шум обусловлен беспорядочной флуктуацией напряжений и токов относительно их среднего значения в электронных компонентах детектора, ввиду дискретности электронов. Дробовой шум - основная составляющая внутренних шумов большинства радиоэлектронных устройств, которые приводят к искажению слабых полезных сигналов и ограничивают чувствительность усилителей.
Тепловой шум, вероятно, является наиболее общим видом шума, возникающего в электронных изображающих системах. Тепловой шум обусловлен тепловым движением электронов в проводниках, в результате чего на концах проводников возникает флуктуирующая разность потенциалов. В отличие от дробового шума тепловой шум зависит от температуры.
Также в системе детектора присутствуют два типа радиометрической ошибки: абсолютная и относительная ошибки калибровки. Абсолютная радиометрическая ошибка показывает отклонение между измеренным значением и действительным значением излучения, попадающего
в детектор, и подразумевает детерминированное изменение в выходном сигнале. Относительная ошибка калибровки проявляется как стохастический шум. К появлению абсолютных ошибок могут привести изменения коэффициента пропускания оптики, изменения в характеристиках усилителей детектора, а к появлению относительных ошибок - изменения квантовой эффективности детектора. Таким образом, шумы в детекторе зависят от типа и расположения детектора.
Основные виды шумов и методы их подавления
Глобальный шум характеризуется случайным изменением DN-значений в каждом пикселе. Такой шум могут уменьшить низкочастотные пространственные фильтры, особенно если он является некоррелированым от пиксела к пикселу. Но в этом случае колебания чистого сигнала будут также уменьшены, хотя и в меньшем количестве, из-за существующей в сигнале пространственной корреляции. Более сложные алгоритмы, которые подавляют шум, но сохраняют четкость изображения, известны как edge-preserving smoothing algorithms (сглаживающие фильтры, сохраняющие границы) [1-2].
Локальный шум проявляется в отдельных пикселах и линиях и, как правило, вызывается потерей передачи данных, резким перенасыщением детектора или другими проблемами в электронике. В зашумленных пикселах обычно имеются нулевые DN-значения, что указывает на потерю данных, или максимальные DN-значения, что указывает на перенасыщенность. Локальный пиксельный шум называют «солевым шумом» («salt noise»), если зашумленные пикселы имеют повышенное значение яркости, или «перечным шумом» («pepper noise»), если зашумленные пикселы затемнены. Усредняющий фильтр удаляет зашумленные линии на изображении, но в то же время изменяет многие другие пикселы. В условном усредняющем фильтре применяется алгоритм сравнения каждого пиксела исходного изображения с его непосредственными соседними пикселами выше и ниже. Если текущий пиксел отличается от среднего значения его двух соседних пикселов (выше и ниже) больше указанного порога, его значение заменяется средним между этими тремя пикселами.
Глобальный периодический шум является ложной, повторяющейся структурой, которая имеет последовательные характеристики по всему изображению. Одним из источников являются электронные взаимодействия в оборудовании приема или передачи данных; другим - различие в калибровке детекторов. Последовательная периодичность шума приводит к четким пикам при Фурье-преобразовании изображения. Если шумовые пики находятся на достаточном удалении от спектра изображения (шум - относительно высокой частоты), они могут быть удалены простым установлением их амплитуды в нуль. Затем отфильтрованный спектр может быть подвергнут обратному Фурье-преобразованию для получения изображения без шума. Если частотные характеристики шума находятся в пределах спектра изображения, то действительная часть изображения будет также удалена, если установить амплитудные значения пиков шума в нуль. На практике эта проблема частично улучшается заменой пиков шума в области Фурье значениями, интерполированными по ближайшим соседним областям, свободным от шума.
Локальный периодический шум отличается от общего периодического шума тем, что амплитуда, фаза или частота шума могут изменяться на всем изображении. Одним из подходов к решению этой проблемы является оценка локальной величины шума и удаление этой величины в каждом пикселе.
Различная чувствительность детекторов и другие электронные факторы могут стать причиной полосового шума на изображении (striping). Если полосовой шум вызван различием в калибровке детекторов, он имеет периодичность, соответствующую количеству детекторов, например, 16 для снимков ТМ или 10, 20 или 40 для снимков MODIS. Исправление полосового шума лучше делать перед любой геометрической коррекцией, так как после нее массив данных не будет ортогональным к направлению сканирования, и удалить полосовой шум будет намного труднее. Были разработаны различные методы для исправления полосового шума [3-6].
Для описания случайных воздействий на сигнал в изображающих системах пользуются моделями аддитивного, импульсного и мультипликативного шума [7; 208].
Модель аддитивного шума используется, когда сигнал на выходе системы или на каком- нибудь промежуточном этапе его преобразования может рассматриваться как сумма полезного сигнала и некоторого случайного сигнала (шума). Так, например, описывают действие зернистости фотопленки, флуктуационный шум в радиотехнических системах и т.п. Эффект добавления шума на изображении, представленном в DN-значениях, для i-го и j-го пикселов может быть записан в виде суммы истинного сигнала S и шума na [8; 689]:
DN(i,j) = S(i,j) + na(i,j).
Импульсный шум характеризуется заменой части пикселей на изображении значениями фиксированной или случайной величины. На изображении такие помехи выглядят изолированными контрастными точками. Импульсный шум характерен для устройств ввода изображений с телевизионной камеры, систем передачи изображений по радиоканалам, а также для цифровых систем передачи и хранения изображений. Для удаления импульсного шума используется специальный класс нелинейных фильтров, построенных на основе ранговой статистики. Общей идеей таких фильтров является детектирование позиции импульса и замена его оценочным значением, при сохранении остальных пикселей изображения неизменными.
Мультипликативная модель применяется, когда можно считать, что полезный сигнал умножается на случайный сигнал. Таково, например, в первом приближении действие шума фотоэлектронных умножителей. Мультипликативный шум (спекл-шум) образуется в результате когерентной суперпозиции от пространственно случайных источников рассеяния. Рассеянные волны накладываются друг на друга, вызывая тем самым появление спекл-шума на изображении. Эффект добавления спекл-шума на изображении может быть представлен, как [8; 690]:
DN(i,j) = S(i,j)nm(i,j). Этот вид шума зависит от величины отраженного сигнала. Фильтрация изображений
Ослабление действия шума достигается фильтрацией. При фильтрации яркость (сигнал) каждой точки исходного изображения, искаженного помехой, заменяется некоторым другим значением яркости, которое признается в наименьшей степени искаженным помехой. Изображение часто представляет собой двумерную функцию пространственных координат, которая изменяется по этим координатам медленнее (иногда значительно медленнее), чем помеха, также являющаяся двумерной функцией. Это позволяет при оценке полезного сигнала в каждой точке кадра принять во внимание некоторое множество соседних точек, воспользовавшись определенной похожестью сигнала в этих точках. В других случаях, наоборот, признаком полезного сигнала являются резкие перепады яркости. Однако, как правило, частота этих перепадов относительно невелика, так что на значительных промежутках между ними сигнал либо постоянен, либо изменяется медленно. И в этом случае свойства сигнала проявляются при наблюдении его не только в локальной точке, но и при анализе ее окрестности. Понятие окрестности является достаточно условным. Она может быть образована ближайшими по кадру соседями, но могут быть окрестности, содержащие многие и сильно удаленные точки кадра. В этом последнем случае, конечно, степень влияния далеких и близких точек на решения, принимаемые фильтром в данной точке кадра, будет совершенно различной. Таким образом, фильтрация основывается на рациональном использовании данных как из рабочей точки, так и из ее окрестности.
Пространственные фильтры можно разделить на три категории [9; 55]:
- фильтры низкой частоты – подчеркивают детали низкой частоты, чтобы сгладить шум и уменьшить ступенчатость изображения (сглаживающие, усредняющие фильтры);
- фильтры высокой частоты – подчеркивают детали высокой частоты, выделяют и подчеркивают линейные особенности – дороги, границы земля/вода, увеличивают детализацию без воздействия на элементы низкой частоты (фильтры резкости);
- фильтры подчеркивания границ – подчеркивают границы, окружающие объекты изображения, чтобы сделать их более различимыми. Результатом является изображение с серым тоном и черно-белыми линиями, окружающими границы объектов на изображении.
Сигма-фильтр
Основная проблема в сглаживании пространственного шума заключается в получении оптимального соотношения между усреднением шума и усреднением сигнала. При этом необходимо разделить эти две компоненты перед усреднением. В σ-фильтре они разделяются по контрасту [10]. Идея построения σ-фильтра основана на том, что закон распределения шума можно приближенно считать гауссовским. 95,5% значений гауссовского распределения отклоняются от среднего значения меньше, чем на 2σ. В соответствии с алгоритмом σ-фильтра оценивается среднее значение и среднеквадратическое отклонение яркостей в пределах достаточно большой маски; пикселы, имеющие яркость выше этого допуска, исключаются. Вместо исключенных пикселов подставляется среднее по окрестности. Отфильтрованное изображение составляют только те пикселы, которые имеют DN-значения в указанном пороге Δ относительно усредненных по окрестности DN-значений. Порог Δ может быть установлен в пределах стандартного отклонения σ DN-значений для глобального шума:
∆ = kσ.
Если шум зависим от сигнала, порог Δ может быть адаптирован для локального стандартного отклонения:
∆local = kσlocal
Однако, фильтр становится чувствительным к более высоким контрастным характеристикам сигнала, и они сглаживаются соответственно. σ-фильтр наиболее эффективен в борьбе с импульсными помехами в виде небольших точек.
Фильтр Нагао-Мацуямы
У σ-фильтра нет никакой направленной чувствительности. Многие пространственные характеристики области интереса линейны, по крайней мере для локальных областей. Фильтр Нагао-Мацуямы был разработан для адаптации к линейным характеристикам при различных ориентациях [11]. В данном фильтре используется окно 5? 5, и для каждого положения окна вычисляются DN-значения и изменения в каждом из девяти субокон (рис. 3). Значение субокна с самым низким изменением используется для выходного DN-значения. Таким образом, фильтр находит самую однородную локальную область (из девяти) и использует ее среднее значение для выходного сигнала.
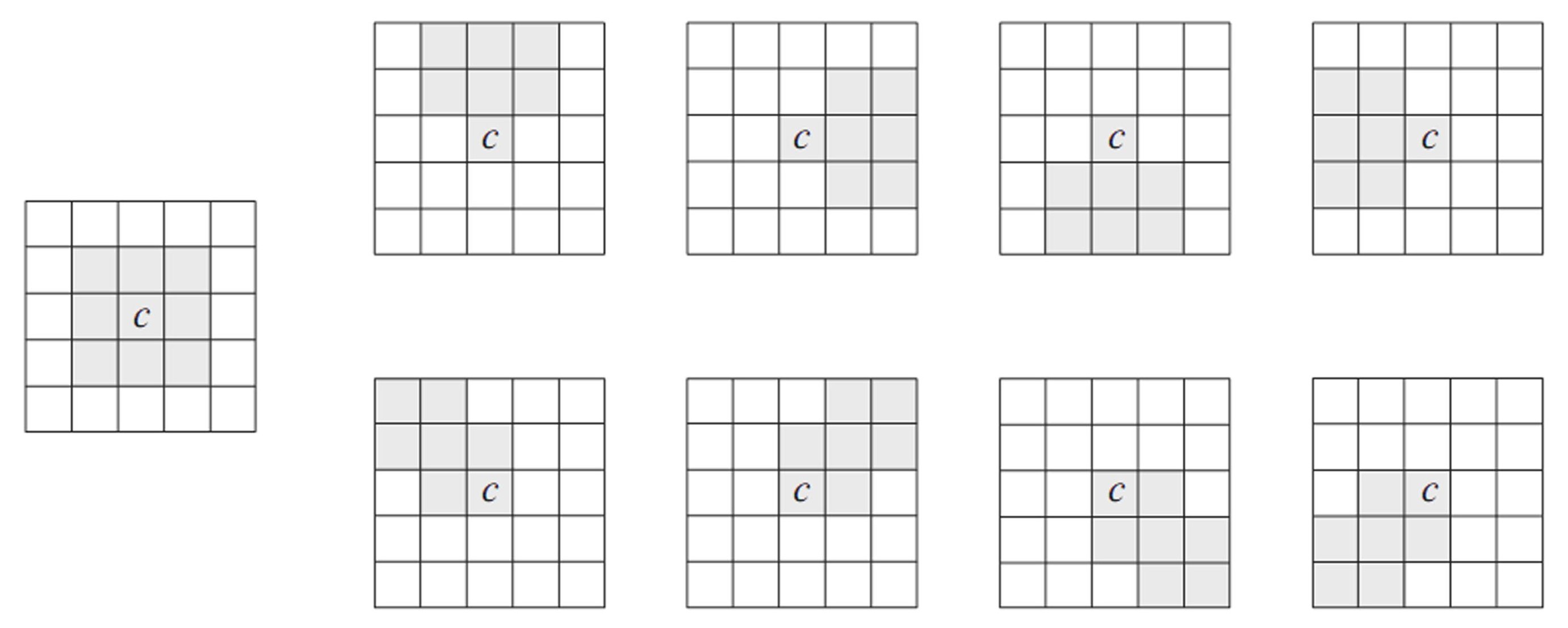
Рис. 3. Девять субокон используются для вычисления локальных изменений
DN-значений по алгоритму Нагао-Мацуямы.
Медианный фильтр
Медианный фильтр представляет собой оконный фильтр, последовательно скользящий по массиву сигнала и возвращающий на каждом шаге один из элементов, попавших в окно (апертуру) фильтра. Медианная фильтрация основана на замене значений отсчетов в центре апертуры медианным значением исходных отсчетов внутри апертуры фильтра, т.е. центральный элемент апертуры заменяется медианой всех элементов изображения внутри апертуры. Так, медианой дискретной последовательности а1, а2, …, аn для нечетного n является тот ее элемент, для которого существуют (n-1)/2 элементов, меньших или равных ему по величине, и (n-1)/2 элементов, больших или равных ему по величине. Если в апертуру фильтра попали элементы изображения со значениями 50, 70, 210, 100 и 130; в этом случае центральный элемент заменяется значением 100,
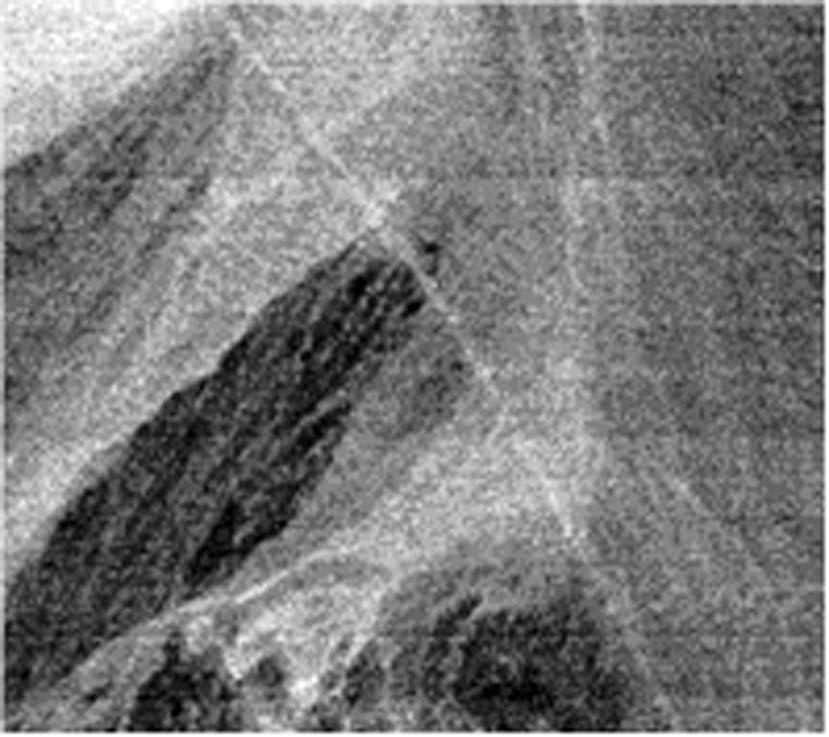
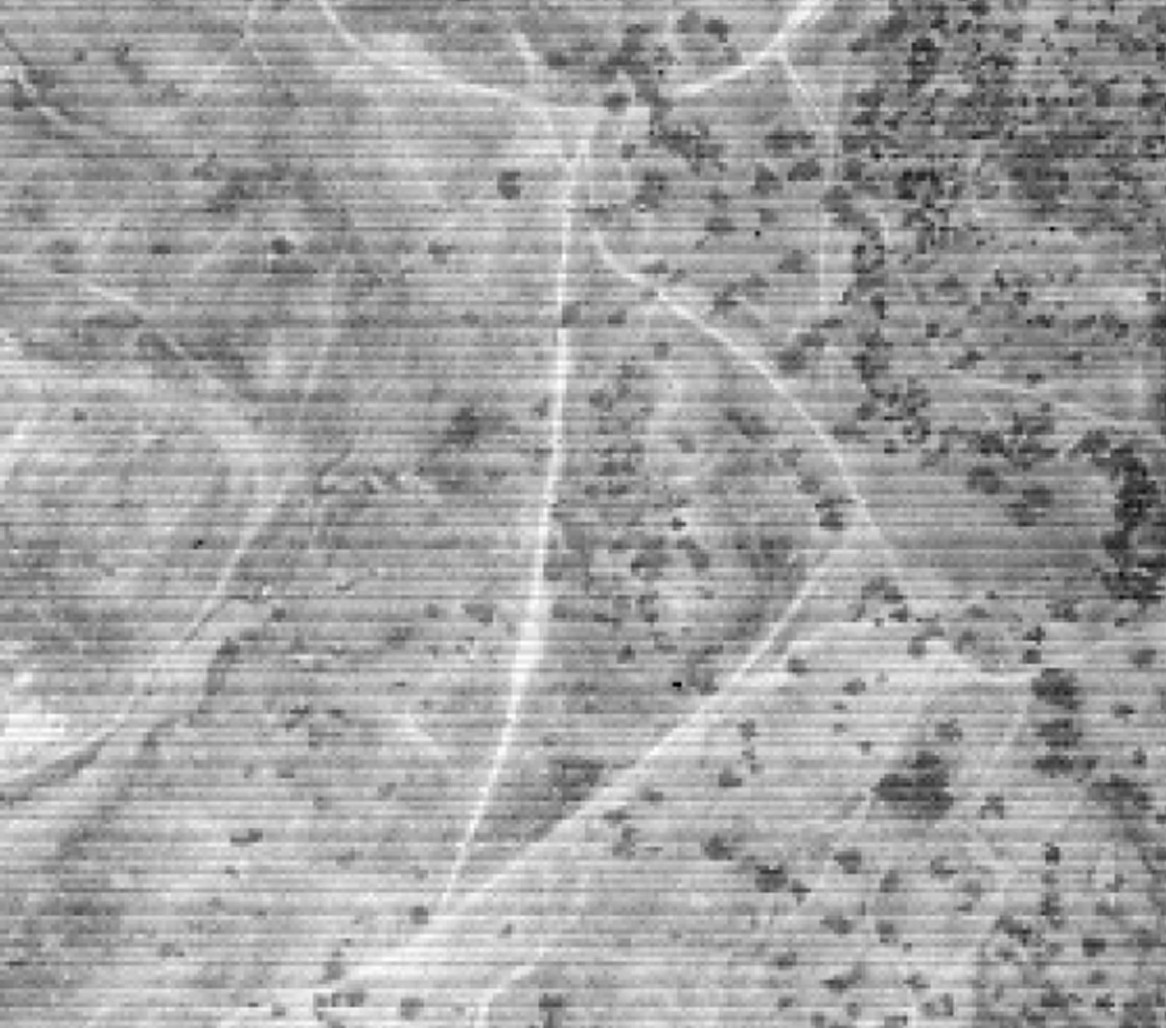
которое является медианой упорядоченной последовательности 50, 70, 100, 130, 210. Если при этом значение 210 является шумовым выбросом в монотонно возрастающей последовательности, то медианная фильтрация обеспечит существенное улучшение. Если же значение 210 соответствует полезному импульсу сигнала (при использовании широкополосных датчиков), то обработка приведет к потере четкости воспроизводимого изображения. Таким образом, медианные фильтры очень эффективны для сглаживания импульсного шума, но могут приводить и к исчезновению мелких деталей изображения. На рис. 4 показан пример применения медианной фильтрации к снимку с импульсным шумом, полученного с прибора LISS-3 спутника IRS-P6.

 а) б)
а) б)
Заключение
Рис. 4. а) - исходный снимок с импульсным шумом; б) – снимок после медианной фильтрации
Как было отмечено, источники шумов могут быть различными. И прежде чем применять тот или иной алгоритм шумоподавления, необходимо проанализировать изображение и структуру шума. В некоторых случаях, для оценки шумовых параметров применяют данные о калибровке детектора и тестовые изображения. Однако, таких данных не всегда достаточно или не всегда ясен источник шума (например, вмешательство от другого оборудования или влияние внешних источников сигнала). В таком случае необходимо извлечь всю возможную информацию о шуме из самого изображения. Фильтрация шумов не имеет единственного алгоритма, который можно было бы применить во всех случаях. При использовании большинства методов фильтрации требуется вычисление специфичных параметров изображения и «интерактивная настройка» этих параметров для достижения удовлетворительных результатов.
ЛИТЕРАТУРА
- Abramson S.B., Schowengerdt R.A. Evaluation of edge–preserving smoothing ? lters for digital image mapping // ISPRS Journal of Photogrammetry and Remote Sensing. – 1993. – Vol. 48. – Issue 2. – pp. 2-17.
- Chin R.T., Yeh C.-L. Quantitative evaluation of some edge-preserving noise-smoothing techniques // Computer Vision, Graphics and Image Processing. – 1983. – Vol. 23. – pp. 67-91.
- Algazi V.R., Ford G.E. Radiometric equalization of nonperiodic striping in satellite data // Computer Graphics and Image Processing. – 1981. – Vol. 16. – Issue 3. – pp. 287-295.
- Poros D.J. Peterson C.J. Methods for destriping Landsat Thematic Mapper images - A feasibility study for an online destriping process in the Thematic Mapper Image Processing System (TIPS) // Photogrammetric Engineering and Remote Sensing. – 1985. – Vol. 51. – № 9. – pp. 1371-1378.
- Horn B.K.P., Woodham R.J. Destriping Landsat MSS images by histogram modi? cation // Computer Graphics and Image Processing. – 1979. – Vol. 10. – № 1. – pp. 69-83.
- Pan J.-J., Chang C.-I. Destriping of Landsat MSS images by ? ltering techniques // Photogrammetric Engineering and Remote Sensing. – 1992. – Vol. 58. – № 10. – pp. 1417-1423.
- Ярославский Л.П. Введение в цифровую обработку изображений. – М.: Советское радио, 1979. –312 с.
- Corner B.R., Narayanan R.M., Reichenbach S.E. Noise estimation in remote sensing imagery using data masking // International Journal of Remote Sensing. – 2003. – Vol. 24. – № 4. – pp. 689–702.
- Токарева О.С. Обработка и интерпретация данных дистанционного зондирования Земли. – Томск: Изд-во Томского политехнического университета, 2010. – 140 с.
- Lee J. Digital image smoothing and the sigma ? lter // Computer Vision, Graphics and Image Processing. – 1983. – Vol. 24. – Issue 2. – pp. 255-269.
- Nagao M., Matsuyama T. Edge preserving smoothing // Computer Graphics and Image Processing. – 1979. – Vol. 9. – № 4. – pp. 394-407.