Структурная схема расчета тормозных устройств грузоподъемных кранов без учета трения в подвижных соединениях
Определение и установление зависимости между тормозным моментом, создаваемым тормозным устройством грузоподъемного крана (ГПМ) и усилием приведенным к этому же устройству от привода является актуальной прикладной научно-технической задачей.
Как известно, под расчетом тормозных устройств колес ГПМ имеется в виду нахождение зависимости между тормозным моментом, создаваемым тормозным механизмом и силой приведенной к этому же механизму привода.
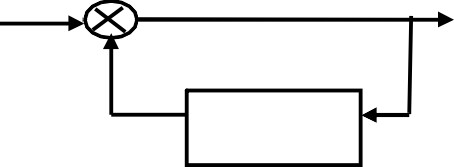
Для решения данной задачи необходимо рассмотреть работу тормозного устройства, как систему автоматического регулирования по нагрузке, функциональная схема которой приведена на рис. 1.
Объектом регулирования данной системы (рис. 1), является тормозной барабан, выходным параметром которого является тормозной момент. Тормозные колодки в данной системе (рис. 1) включены в обратную связь, при этом часть нормального усилия, действующего со стороны барабана на колодки, преобразуется на тормозных колодках в усилиях их прижатия к барабану (самоусиление), которые складываются с усилиями на колодках от действия привода управления.
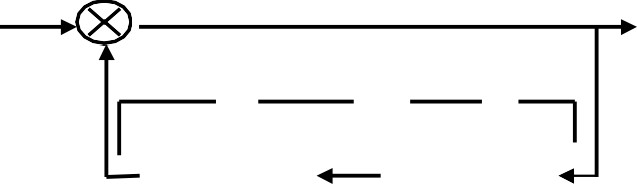
Используя функциональную схему (рис.1), составим структурную схему, представленную на рис. 2, применительно к тормозному устройству с одной тормозной колодкой. Преобразующие свойства элементов систем определяются отношением выходного сигнала элемента к сигналу, действующему на его входе [1]. Преобразующее свойство колодки по усилию управления характеризуется коэффициентом Ку, который определяется отношением:



 (1)
(1)
Руп Рн

Усилитель
 Тормозные
Тормозные
Тормозной барабан
колодки
Рис. 1. Функциональная схема тормозного устройства
Руп Рнуп Рн Мт


 ± Р0
± Р0
Кус
Кб
мк
КF
KK

 K0
K0

Рис.2. Структурная схема тормозного устройства с одной колодкой
 Преобразующие свойства барабана, как объекта регулирования, определяются отношением тормозного момента к результирующей нормальной силе, действующей на поверхность трения барабана, т.е.
Преобразующие свойства барабана, как объекта регулирования, определяются отношением тормозного момента к результирующей нормальной силе, действующей на поверхность трения барабана, т.е.
Кб=
 (2)
(2)
Функцией тормозной колодки в обратной связи является преобразование результирующей нормальной силы в дополнительную силу P0, действующую на поверхность трения барабана.
Преобразующие свойства тормозной колодки характеризуются коэффициентом обратной связи, Коб.св,

 Коб.св.= , (3)
Коб.св.= , (3)
где Р0- усилие на поверности трения, создаваемые тормозной колодкой за счет действия результирующей нормальной силы.
Коэффициент преобразования обратной связи (рис. 2) определяется следующим выражением:
Коб.св.=Кисп.н.у·Кпр.п.м , (4)
где Кисп.н.у - коэффициент использования нормального усилия для работы обратной связи; Кпр.т.м- коэффициент преобразования тормозного момента, действующего на тормозную колодку, в силу притяжения ее к тормозному барабану.
 Используя закономерности преобразования структурных схем, применяемые в теории автоматического регулирования, устанавливаем взаимосвязь между усилием управления Руп. и тормозным моментом колодочного тормозного устройства, т.е
Используя закономерности преобразования структурных схем, применяемые в теории автоматического регулирования, устанавливаем взаимосвязь между усилием управления Руп. и тормозным моментом колодочного тормозного устройства, т.е
 Мт = (5)
Мт = (5)
В полученном выражении (5) знак ( - ) определяет работу тормозного устройства с самоусилением (положительная обратная связь), а знак (+) – пассивное тормозное устройство.
Следует указать, что при Кпр.т.м· Кисп.н.у = 0 имеет место «нейтральное» тормозное устройство, у которого тормозной момент создается только за счет действия усилия управления, при этом уравнение тормозного момента определяется выражением :
Мт= Руп·Кус· Кб (6)
Выражения для коэффициентов передачи: Кус, Кб, Кисп.н.у. и Кпр.т.м зависят от конструктивных особенностей тормозного устройства ( способ крепления колодки и способ приложения усилия).
Рассмотрим подробно расчет трех разновидностей колодок, как базовых элементов любого тормозного устройства барабанного типа с внутренним расположением тормозных колодок.
Выводы
Рассмотрена работа тормозного устройства ГПМ, как системы автоматического регулирования по нагрузке. Использованием функциональной схемы была составлена структурная схема тормозного устройства с одной колодкой. Получена аналитическая взаимосвязь между усилием управления Руп и тормозным моментом колодочного тормозного устройства.
ЛИТЕРАТУРА
1. Первозванский А.А. Курс теории автоматического управления: Учеб.пособие – М.: Наука, 1988-16с.