3D ПРОЕКТИРОВАНИЕ И КИНЕМАТИЧЕСКИЙ АНАЛИЗ УДАРНОГО МЕХАНИЗМА БУРИЛЬНОГО СТАНКА ВЕЕР-1Г
Большое количество зарубежных предприятий и фирм занимаются производством и продажей вибрационного оборудования и оборудования ударного действия. Достаточно большим является внутренняя потребность Казахстана в ударных и вибрационных и буровых машинах, в котором стратегически важным определены развитие горно-металлургической отрасли, жилищное строительство и строительство автомобильных дорог, горнодобывающая промышленность, разведка и бурения пород и нефти и т.п. В последнее время в машиностроительной практике вибротехника создается на базе импульсных рычажных механизмов и механизмов переменной структуры. Импульсные рычажные механизмы (ИРМ) и механизмы переменной структуры (МПС) обладают уникальными возможностями резкого, почти мгновенного изменения законов движения исполнительного звена под действием незначительного возмущения за счет геометрических свойств без разрыва кинематической цепи механизма. На кафедре «ТМ и ОКМ» на основе математического моделирования проводятся исследования динамических процессов бурильного станка ВЕЕР-1Г.
В процессе исследования бурильного механизма возникают следующие задачи:
- Используя систему Autodesk Inventor 2011 создать трехмерную модель рамы бурильного станка;
- Выявить действующие силы и провести прочностной анализ рамы;
- Вывести деталировочные чертежи рамы;
- Провести кинематический анализ ударного механизма, определить скорость и ускорение ударяемой по волноводу точки.
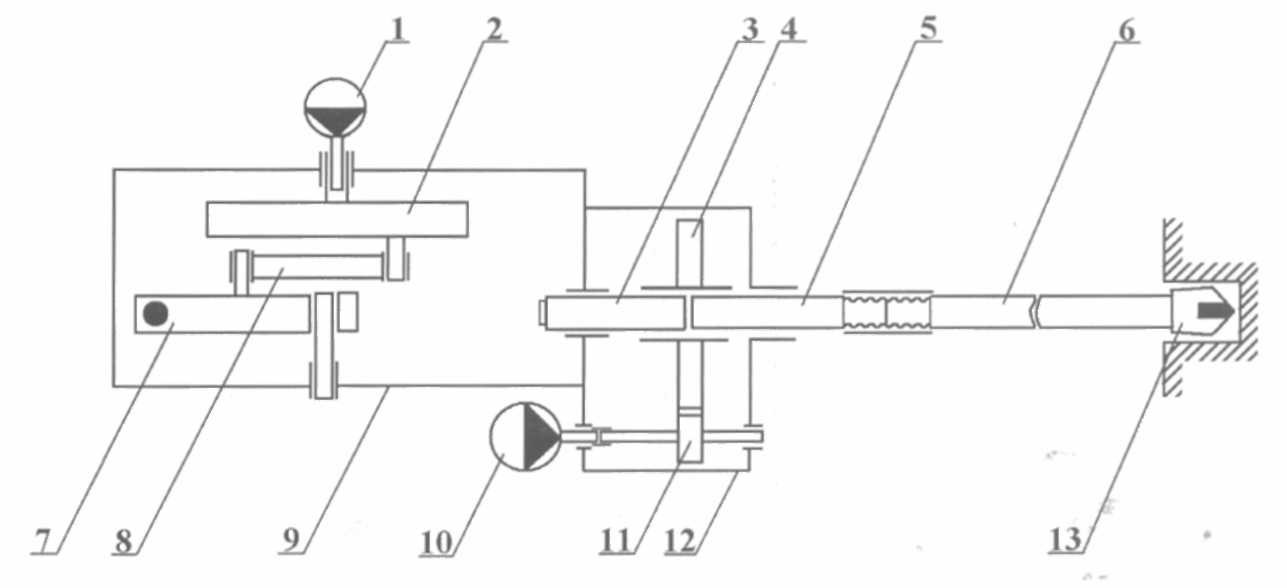 Бурильный механизм БГ-1М, кинематическая схема, которой представлена на рисунке 1, предназначен для бурения шпуров и скважин при проходке горных выработок и добыче полезных ископаемых буровзрывным способом.
Бурильный механизм БГ-1М, кинематическая схема, которой представлена на рисунке 1, предназначен для бурения шпуров и скважин при проходке горных выработок и добыче полезных ископаемых буровзрывным способом.
Рис. 1. Кинематическая схема бурильной головки БГ-1М
1-гидромотор ударника; 2-кривошип; 3-волновод;
4-зубчатое колесо вращателя; 5-хвостовик; 6-штанга; 7-коромысло; 8-шатун; 9-корпус ударника; 10-гидромотор вращателя;
11-вал шестерня вращателя; 12-корпус вращателя; 13-коронка
Механизм состоит из ударного, упорного и вращательного узла. Ударный узел с механизмом переменной структуры (МПС), представляет собой шарнирный четырехзвенный механизм кривошипно-коромыслового типа с определенными соотношениями длин звеньев - кривошипа, шатуна, коромысла и опоры. Предназначенный для преобразования вращения кривошипа 2, который приводится в движение с помощью гидромотора 1, в качательное движение коромысла 7, который в особом положении механизма, когда все звенья механизма встраиваются в одну линию, наносит удары по волноводу 3. Энергия удара через волновод, хвостовик 5 и буровую штангу 6 передается к забою.
При помощи системы Autodesk Inventor 2011 было проведено 3D проектирование данного механизма. Вначале создавались отдельные детали, а затем была проведена сборка механизма. Кинематическая схема ударного механизма показана на рисунке 2. Массы звеньев: m1=5,465 кг; m2=0,612 кг; m3=2,582 кг; Частота ударов 25-70 Гц.
 Рис. 2. Кинематическая схема ударного механизма.
Рис. 2. Кинематическая схема ударного механизма.
1-кривошип; 2-шатун; 3-коромысло

На рис.3 показано компьютерное изображение ударного механизма в аксонометрии. Кроме того, была выполнена анимация движения ударного механизма.
Рис. 3 Компьютерное изображение ударного механизма
Механизм в особом положении производит удар по волноводу. В этот момент скорость и ускорение ударяемой точки становятся очень большими.

Рис. 4. Схема механизма с обозначениями переменных
Положение точки С определяется по следующим формулам:
xC xA l1 cos1;
yC yA l1 sin 1;


 В треугольнике АСD задано положение трех точек — вершин треугольника. Находят параметры базового вектора b hCB :
В треугольнике АСD задано положение трех точек — вершин треугольника. Находят параметры базового вектора b hCB :
C
b (xC
- xD
)2 y
- yD
2 ;
sin b ( yC yD ) / b ;
cos b (xC xD ) / b ;
 b arctg (sin b / cosb );
b arctg (sin b / cosb );
Вектор b является базовым для присоединения звеньев 2 и 3:


l2 d
или


l2 d *

и l3 c
или

l3 c * . При образовании трехвекторного контура возможны два
варианта:
DCB
(основные линии) и
DCB *
(штрихпунктирные линии). Поэтому необходимо
учитывать знак сборки контура:
sgn(MB (b)) 1 . Для краткости
(MB (b))
обозначают (В) или
(В*).Тогда sgn(B) 1; sgn(B*) 1 .Углы UD, UC, UB в косоугольном треугольнике не зависят от сборки контура. Их определяют как углы в косоугольном треугольнике при заданных длинах трех сторон:
cosUB
cosUD
c2 d 2 b2
 2 c d ;
2 c d ;
b2 c2 d 2
 2 b c ;
2 b c ;
cosUC
Функции положения звеньев механизма: звено 3
d 2 b2 c2
 2 d b ;
2 d b ;

c b UD sgn(MB (b)) b UD;
так как
sgn(B) 1, k 0
звено 2
c* b UD, так как
sgn(B*) 1, k 0

d b UC sgn(MB (b)) 2k b UC,
так как sgn(B) 1, k 0
d * b UC, так как sgn(B*) 1, k 0
Координаты пары В звеньев 2 и 3:
или
xB xC l2 cosd ; xB* xC l2 cosd* ;
xB xD l3 cosc ; xB* xD l3 cosc* ;
yB yC l2 sind ; yB* yC l2 sind* ;
yB yD l3 sinc ; yB* yD l3 sinc* ;
Для проведения кинематического анализа ударного механизма была составлена программа в системе Maple. На рис. 5 показано изменение угла поворота 3-го звена  Рис. 5.
Рис. 5.
На рис. 6 показано изменение скорости ударяемой точки 3-го звена.
 Рис. 6
Рис. 6
На рис. 7 показано изменение ускорения ударяемой точки 3-го звена.
 Рис. 7.
Рис. 7.
На рис. 8 показано изменение угловой скорости 3-го звена.
 Рис. 8.
Рис. 8.
На рис. 9 показано изменение углового ускорения 3-го звена
 Рис. 9.
Рис. 9.
На рис. 10 показан план 24 положений ударного механизма
 Рис. 10.
Рис. 10.
Как видно из проведенных расчетов, скорость и ускорение ударяемой точки 3-го звена в особом положении принимает большие значения. Это приводит к большой силе удара.
ЛИТЕРАТУРА
- C.А. Попов. Г. А., Курсовое проектировоние по теории механизмов и ммеханике машин– М.:“Высшая школа” 1998. – 351 с.
- Дьяконов В Maple 6: учебный курс. Система компьютерной математики – СПб.: Питер, 2001.-608с.:
- И.И. Артоболевский Теория механизмов и машин: Учебник для вузов М: Наука 1988.-640 с.
- Кожевников С.Н. Теория механизмов и машин. Учебное пособие для студентов вузов. М:«Машиностроение» 1973.- 592 с.
- Дэниэл Т. Банах, Трэвис Джонс, Алан Дж. Каламейя. Autodesk Inventor. Издательство «Лори», 2006, 714с.
- М.Н. Кирсанов. Задачи по теоретической механике с решениями в Maple 11. М.: Физматлит, 2010, 264с.
- В.3. Аладьев, В.К. Бойко, Е.А. Ровба. Программирование и разработка приложений в Maple. Гродно,Таллин, 2007.
- В.З. Аладьев. Основы программирования в Maple. Таллин, 2006.
- М.Н. Кирсанов. Графы в Maple. М.: Физматлит, 2007, 168с.