Развитие теории и практики электромеханических систем, используемых для электроприводов
Многообразие и ответственность функциональных задач, решаемых электромеханическими системами (ЭМС), жесткие требования и стандарты, предъявляемые к их технико-экономическими, экологическими, эргономическим и другим показателям, приводят к необходимости создания сложных ЭМС, в состав которых кроме основного системообразующего компонента – электромеханического преобразователя (ЭМП) – могут включаться разнообразные преобразователи электрической, механической и других видов энергии, устройства контроля, управления, защиты и пр. Электроприводы – устройства, функциональное назначение которых состоит в преобразовании электрической энергии в механическую. Функции, выполняемые данными системами весьма широки: обеспечение простейших операций пуска, остановки и реверсирования ЭМП. Обеспечение задания и автоматической стабилизации на заданном уровне в установившихся режимах каких-либо показателей (частоты вращения момента) при действии возмущающих воздействий; осуществление следящего управления; управления технологическими машинами по заранее заданной программе; обеспечение выбора наилучших (оптимальных) режимов работы электроприводов технологических машин по какому-либо критерию при воздействии случайных возмущений [1].
В промышленности и быту применяют двигатели переменного и постоянного тока. Исторически сложилось, что для регулирования скорости вращения чаще использовали двигатель постоянного тока. Преобразователь в данном случае регулировал только напряжением, был прост и дешёв. Однако двигатели постоянного тока имеют сложную конструкцию, критичный в эксплуатации щёточный аппарат и сравнительно дороги.
Возможность управления частотой вращения короткозамкнутых асинхронных электродвигателей (АД) была доказана сразу же после их изобретения. Реализовать эту возможность удалось лишь с появлением силовых полупроводниковых приборов - сначала тиристоров, а позднее транзисторов IGBT. В настоящее время во всем мире широко реализуется способ управления асинхронной машиной, которая сегодня рассматривается не только с точки зрения экономии энергии, но и с точки зрения совершенствования управления технологическим процессом.
Принципиальная возможность регулирования скорости АД изменением частоты питающей сети f1 следует из соотношения =2 f1(1–s)/ p. При неизменном напряжении питания U1 по мере изменения частоты f1 будет также изменяться и магнитный поток двигателя Ф , поскольку, как уже отмечалось, Ф U 1 / f1. При снижении частоты f1 и неизменном U1 поток возрастет. Это приведет к насыщению стали двигателя и как следствие к резкому увеличению тока и его перегреву. Увеличение f1 вызовет снижение потока и соответственно допустимого момента АД. Поэтому для сохранения высоких энергетических показателей регулирования необходимо с регулированием f1 одновременно в функции частоты и нагрузки двигателя изменять и напряжение питания АД.
Существует два основных типа преобразователя частоты: с непосредственной связью и с промежуточным контуром постоянного тока. В первом случае выходное напряжение синусоидальной формы формируется из участков синуса преобразуемого входного напряжения. При этом максимальное значение выходной частоты не может быть равным частоте питающей сети. Частота на выходе преобразователя этого типа обычно держит в диапазоне от 0 до 25 – 35 Гц. Но наибольшее распространение получили преобразователи частоты с промежуточным контуром постоянного тока, выполненные на базе инвертора напряжения. Принцип работы инвертора: переменное напряжение промышленной сети выпрямляется блоком выпрямительных диодов и фильтруется батареей конденсаторов большой емкости для минимизации пульсаций полученного напряжения. Это напряжение подается на мостовую схему, включающую шесть управляемых IGBT транзисторов с диодами, включенными антипараллельно для защиты транзисторов от пробоя напряжением обратной полярности, возникающем при работе с обмотками двигателя. Используя специальный алгоритм управления - открывая и закрывая перекрестные пары транзисторов, формируют последовательность импульсов напряжения разной скважности – это называется широтно-импульсная модуляция (ШИМ) в фазах двигателя. При этом ток в фазах
двигателя приобретает форму синусоид, сдвинутых во времени, что достаточно для формирования вращающегося магнитного поля и вращения двигателя. Регулируя частоту напряжения и амплитуду сигнала, мы можем менять скорость вращения двигателя. Так, возможен диапазон регулирования частоты от 0 до нескольких тысяч Гц.
Структурная схема такого преобразователя приведена на рис. 1.
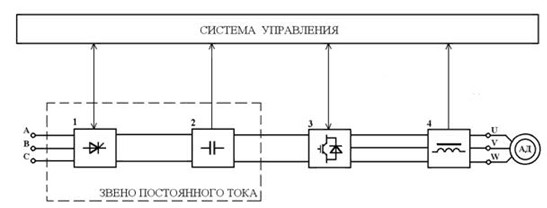
Рис. 1. Структурная схема преобразователя частоты с промежуточным контуром постоянного тока.
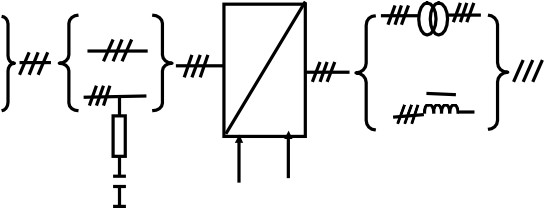
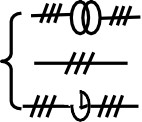
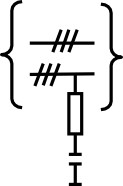
Базовыми элементами асинхронного частотно-регулируемого электропривода (рис.2) являются управляемый преобразователь частоты ПЧ (UZF), питающийся от промышленной сети напряжением Uс и частотой fс и асинхронный двигатель АД (М), питающийся от ПЧ. При необходимости согласования мощности и входных напряжений питания собственно ПЧ с сетью между ними может устанавливаться согласующий трансформатор TV1. Для ограничения токов короткого замыкания и перенапряжений на входе ПЧ могут устанавливаться токоограничивающие реакторы L1 и дополнительные RC – фильтры Ф1. При необходимости согласования выходного напряжения ПЧ и цепи питания М (например, для высоковольтных электрических машин) между ними могут устанавливаться согласующие трансформаторы TV2. При значительном удалении двигателя от преобразователя (при длине кабельной связи между ними более 50 м, а для ряда преобразователей допускается и более 200 м) на выходе ПЧ для ограничения перенапряжений на его силовых полупроводниковых элементах устанавливаются фильтрующие дроссели L2, а также помехоподавляющие RC-фильтры Ф2.
Uc,fc

TV1
UZF
 Uc,fc
Uc,fc
U1,f1
TV2


 М
М
L1 Ф1 L2 Ф2
uu uf
Рис. 2. Состав силовой части системы ПЧ-АД
Поэтому асинхронные машины с частотным регулированием могут быть применены во многих отраслях промышленности. Асинхронные двигатели используются в приводе насосов, вентиляторов, регуляторов давления, приводе моталок, разматывателей, ножниц, прессов, карусельной машины и т. п.
В зависимости от характера нагрузки преобразователь частоты обеспечивает различные режимы управления электродвигателем, реализуя ту или иную зависимость между скоростью вращения электродвигателем и выходным напряжением.
Наличие в составе микропроцессоров запоминающих устройств большого объема позволяет реализовать достаточно сложные алгоритмы обработки данных и сделать энергетические объекты
«информационно прозрачными».
Возможность энергосбережения средствами электропривода на практике реализуется следующими путями. Первый путь – правильный выбор двигателей по мощности имеет особо важное значение для массовых электроприводов продолжительного режима работы. Второй путь – использование специальных энергосберегающих двигателей (также при условии правильности выбора по мощности), в которых за счет увеличения массы активных материалов (сталь, медь) повышены номинальные значения КПД и соsφ. Этот путь особенно важен для приводов, работающих с постоянной нагрузкой. Третий путь – оптимизация электроприводов по критерию минимума потерь энергии (или максимума энергетической эффективности). В настоящее время по мере обострения энергетических проблем возрастает необходимость решения подобных задач, а развитие силовой преобразовательной техники и микроэлектроники уже создало необходимые предпосылки для их решения.
Проведенные за последние годы исследования показывают, что наряду с улучшением технологических характеристик механизмов, переход к регулируемому электроприводу может обеспечить в среднем снижение на 20-30% электроэнергии, потребляемой электродвигателями, что позволяет экономить более 10% производимой электроэнергии [3]. Дополнительные затраты связанные с применением регулируемого электропривода окупаются в течении 1-3 года.
Под влиянием возрастающих требований к энергетическим характеристикам электроприводов и их влиянию на сеть развитие получают преобразователи, обеспечивающие экономичные способы управления электроприводами.[4]
Основное функциональное требование к системам ШИМ – обеспечение требуемого (среднего) напряжения питания. Критерии качества – энергетические; минимум дополнительных потерь в двигателе и коммутационных потерь в преобразователе.
Современные цифровые микроконтроллеры содержат встроенные аппаратные средства, обеспечивающие программную ШИМ.
Альтернативой программным ШИМ являются следящие ШИМ, реализуемые в замкнутом контуре, как правило, в регуляторе тока [5], в числе которых – системы со скользящим режимом. Основное отличие алгоритмов скользящих режимов управления от алгоритмов ШИМ состоит в том, что от строго фиксированной несущей частоты сделано отступление в пользу автоматического выбора такой частоты переключения управляемых релейных элементов, при которой удовлетворяются требуемые условия для регулирования переменных.
Современный электропривод, благодаря возможностям управления все в большей степени позволяет повышать производительность и качество технологических процессов при эффективном расходовании энергии.
Конечная цель работы состоит в создании совокупности математических и компьютерных моделей динамических процессов, определяющих уровень функциональных показателей электромеханических систем, а также в применении этих моделей для поиска и исследования алгоритмов эффективного управления.
ЛИТЕРАТУРА
- Цаценкин В.К. Безредукторный автоматизированный электропривод с вентильными двигателями.:− М.: МЭИ, 1991.-240 с.
- Гольц М.Е., Гудзенко А.Б., Остеров В.М. и др. Быстродействующие электропривода постоянного тока с широтно-импульсным преобразователем.: − М.: Энергоатомиздат, 1986. - 184 с.
- Ключев В.И. Теория электропривода: учеб.для вузов.− М.: Энергоатомиздат, 2001.-704 с.
- Энергосберегающие технические решения в электроприводах. − под ред. Н.Ф. Ильинского. – М.: МЭИ, 1985,- 64 с.
- Чиликин М.Г., Ключев В.И., Сандлер А.С.Теория автоматизированного электропривода. − М.: Энергия, 2000-616 с