Синтез параметров нелинейной системы преобразователь частоты – асинхронный двигатель с жос по скорости
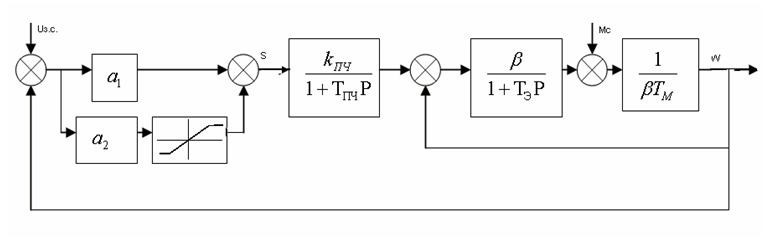
В процессе проектирования и эксплуатации частотно- регулируемого электропривода расчёт основных параметров системы управления является одной из основных задач синтеза [1], для обеспечения устойчивых режимов работы двигателя. Формирование требуемых статических и динамических свойств асинхронного частотно – регулируемого электропривода возможно лишь в замкнутой системе регулирования его координат [2]. В связи с этим в систему регулирования вводится отрицательная обратная связь по скорости. Устойчивость системы управления и динамические показатели качества регулирования во многом определяются выбором коэффициента передачи управляемого преобразователя частоты и выбором параметров корректирующего устройства (регулятора скорости). На рис. 1 приведена структурная схема линеаризованной системы преобразователь частоты – асинхронный двигатель (ПЧ – АД) с обратной связью по скорости. Следует отметить, что данная структурная схема получена на основе [2], но с предлагаемым нелинейным корректирующим устройством. Как видно из рис. 1, структурная схема состоит из асинхронного двигателя, представленного двумя передаточными функциями (интегрирующего и инерционного звеньев), преобразователя частоты с передаточной функцией инерционного звена и двухканального нелинейного корректирующего устройства (ДНКУ). Верхний канал ДНКУ представлен передаточной функцией безынерционного звена, нижний канал представлен передаточной функцией безынерционного звена и существенно- нелинейным звеном с насыщением. Входные сигналы на выходе ДНКУ суммируются, в результате чего создается управляющее воздействие U (t) S .
Рис.1. Структурная схема системы ПЧ – АД с обратной связью по скорости
Для решения задачи синтеза параметров ДНКУ и коэффициента передачи ПЧ, согласно структурной схемы (рис. 1), рассмотрим сначала математическое описание динамики системы ПЧ
– АД, которое будет иметь вид:
TM
d M M ;
dt C
(1)
T dM (
Э dt 0
) M ;
(2)
TПЧ
d0 k
 dt ПЧ
dt ПЧ
S 0 ;
(3)
S a1(UЗ.С. - ) z;
(4)
y a2 (UЗ.С. - ) ; (5)
z k1 y при
 y
y yv ;
yv ;
(6)
z sign( y) при y y ,
v v
где
приращение скорости двигателя;
M приращение момента двигателя;
0 приращение угловой скорости электромагнитного поля асинхронного двигателя;
модуль жесткости линеаризованной механической характеристики; электромагнитная постоянная времени цепей статора и ротора двигателя;
TЭ эквивалентная
TПЧ постоянная
времени цепи управления ПЧ, которая при высоких частотах модуляции выходного напряжения
промышленных ПЧ не превышает 0,001 с; TM электромеханическая постоянная времени двигателя; kРЧ передаточный коэффициент ПЧ;
UЗ.С напряжение на выходе задатчика интенсивности.
Для удобства решения задачи синтеза параметров ДНКУ, т.е. определение коэффициентов
a1 и a 2
и коэффициента передачи преобразователя частоты
kПЧ , после несложных
преобразований с учетом виде:
MC 0 , выше представленные уравнения запишем в следующем
dx1 x ;

 dx2 1
dx2 1
dt T T
dt
 x3
x3
2
1 1
 T x2 T T
T x2 T T
x1 ;
М Э Э М Э
 dx3 kПЧ
dx3 kПЧ

S 1 x ;

(7)
dt TПЧ
TПЧ
S a1 (uЗ .С. x(1)) z; y a2 (uЗ.С . x(1));
3
z k1 y при
y yv ;
z sign( y) при y y ,
v v
где
x1 ,
x2 d / dt ,
x3 0 .
Блок – схема алгоритма синтеза параметров нелинейного корректирующего устройства и параметра преобразователя частоты приведена на рис. 2.
Алгоритм вычислений параметров нелинейного корректирующего устройства (регулятора скорости) заключается в следующем:
- Вводятся исходные данные: величина шага счета h , начальное приближение функции многих
переменных
f1 , численные значения коэффициентов
aij
функции квадратичной формы S ,
коэффициенты ai
корректирующего устройства (регулятора скорости) и передаточный коэффициент k
частотного преобразователя. Все коэффициенты случайных чисел.
aij ,
ai , k задаются в виде случайных чисел датчиком
- Проверяется условие выполнения неравенства численного значения переменной
верхней границе ограничения переменной;
xi по
- Вычисляются частные производные Pi s / xi функции S по каждой переменной xi ;
- Вычисляются численные значения правой части системы дифференциальных уравнений di dxi / dt , описывающих переходные процессы системы ПЧ – АД с жесткой обратной связью по скорости;

Рис. 2. Блок – схема алгоритма синтеза системы ПЧ – АД с обратной связью по скорости
- Вычисляется минимум функции
fmin , представляющая собой сумму функции Ляпунова
V x 2 и её полной производной dV / dt , численным методом сканирования;
i
- Вычисляется новые численные значения переменных
xi xi h с передачей управления
счета на проверку условия не превышения заданной верхней границы переменных
xi ;
- В случае невыполнения условия выводятся результаты счета численных значений
коэффициентов a1, a2 и kПЧ ;
- При полученном численном значении
a1, a2
и kПЧ осуществляется расчет переходного процесса скорости по дифференциальным уравнениям (7) методом Рунге – Кутта;
Для визуального наблюдения за качеством переходного процесса угловой скорости, график переходного процесса выводится на экран дисплея. По кривой переходного процесса скорости асинхронного двигателя (рис. 3) определяются качественные характеристики переходного процесса. Численные значения коэффициентов нелинейного корректирующего устройства равны:
a1 0,29 0,3, a2 0,66 0,7 . Численное значение передаточного коэффициента преобразователя частоты получилось равным - kПЧ 1,99 2 .

Рис. 3. Переходной процесс скорости двигателя
Выводы
- Разработан алгоритм синтеза параметров ДНКУ и коэффициента передачи системы ПЧ – АД с жесткой обратной связью по скорости.
- Алгоритм синтеза параметров системы ПЧ – АД с жесткой обратной связью по скорости может быть использован с несколькими существенными нелинейными звеньями.
- Алгоритм синтеза параметров системы управления может быть использован и для системы управления более высокого порядка.
ЛИТЕРАТУРА
- Башарин А.В., Новиков В.А., Соколовский Г.Г. Управление электроприводами – Ленинград: Энергоиздат, 1982, с. 375 – 383.
- Терехов В.Н., Осипов О.И. Системы управления электроприводов. – М.: Академия, 2006, с. 188.