Предложен новый метод построения и исследования робастной устойчивости системы управления в классе однопараметрических структурно-устойчивых отображений линейными динамическими объектами, с неопределенными параметрами, что позволило предельно увеличить потенциал робастной устойчивости системы.
Предлагается новый метод исследования систем управления с повышенным потенциалом робастной устойчивости на основе геометрической интерпретации второго метода Ляпунова. Условие робастной устойчивости получены в форме простейших алгебраических неравенств, которые являются условием существования вектор функции Ляпунова.
Построена и исследована система управления с повышенным потенциалом робастной устойчивости в классе однопараметрических структурно-устойчивых отображений движением летательного аппарата по тангажу и показано предельное увеличение потенциала робастной устойчивости системы.
Для современных систем управления характерны все возрастающая сложность объектов управления в виде многомерности и нелинейности, требования высокой эффективности и устойчивости в условиях многочисленных неопределенностей и неполной информации. Неопределенность может быть обусловлена незнанием истинных параметров объектов управления и непредсказуемым изменением их во времени. Поэтому актуальной проблемой является создание систем управления, обеспечивающих в некотором смысле наилучшую защиту от неопределенности в знании свойств объекта управления. Способность системы управления сохранять устойчивость в условиях параметрической или непараметрической неопределенности понимается как робастная устойчивость системы [1]. В общей постановке исследование системы на робастную устойчивость состоит в указании ограничений на изменение параметров системы управления [1, 2].
Проблеме исследования робастной устойчивости посвящено большое число работ [1,2,3,4]. В этих работах, в основном, исследуется робастная устойчивость полиномов, матриц, в рамках линейного принципа устойчивости непрерывных и дискретных систем управления. В работах [3,4] рассматривается абсолютная устойчивость как робастная устойчивость системы управления относительно выбора нелинейностей из заданного (секторного) класса, т.е. решаются задачи робастной абсолютной устойчивости.
В практических задачах, связанных с разработкой и созданием систем управления в технике, экономике, биологии и других сферах, в условиях существенной параметрической неопределенности, увеличение потенциала робастной устойчивости является одним из ключевых факторов, гарантирующих системе управления от попадания в режим движения детерминированного хаоса, образуя странные аттракторы и гарантирует применимость моделей и надежность работы спроектированных систем управления.
В настоящее время общепризнано, что реальные объекты управления являются нелинейными и одним из основных свойств нелинейных динамических систем является функционирование в режиме детерминированного хаотического движения [5,6,7]. В линейных динамических системах это проявляется в виде потери устойчивости нулевого стационарного состояния системы управления [8,9,10].
В связи с этим, в условиях неопределенности возникла необходимость в разработке моделей и методов построения системы управления с достаточно широкой областью робастной устойчивости, названные системами управления с повышенным потенциалом робастной устойчивости [8,9,10].
Концепция построения системы управления с повышенным потенциалом робастной устойчивости базируется на результатах теории катастроф [11, 12], где получены основные структурно-устойчивые отображения.
Настоящая статья посвящена построению систем управления с повышенным потенциалом робастной устойчивости динамическими объектами с неопределенными параметрами, с подходом к построению систем управления в классе однопараметрических структурно-устойчивых отображений [8,9,10,13,14],позволяющих предельно увеличить потенциал робастной устойчивости системы.
Исследования последних лет показали, что для исследования робастности линейных или нелинейных систем управления с успехом реально могут применяться методы функций Ляпунова [15,16,17], основанные на геометрической интерпретации теоремы об асимптотической устойчивости в пространстве состояний. Использование метода функций Ляпунова для решения множества практических линейных или нелинейных задач сдерживается отсутствием универсального подхода к построению функции Ляпунова [15,16]. Следует напомнить, что ошибка в выборе или неудача в построении необходимой функции Ляпунова не означает неустойчивость системы, она указывает только на неудачу при построении функции Ляпунова.
Предлагается метод построения вектор-функции Ляпунова [18], на основе геометрической интерпретации теоремы об асимптотической устойчивости и понятий устойчивости. Предполагается, началу координат соответствует невозмущенное движение системы, а уравнения состояния составляется относительно возмущений, т.е. в отклонениях возмущенного движения от невозмущенного [15]. Следовательно, уравнения состояния выражают скорость изменения вектора возмущений (отклонений) и для устойчивой системы вектор скорости направлен к началу координат, а вектор градиента от искомой функции Ляпунова для устойчивой системы всегда будет направлен в противоположную сторону. Это позволяет представить функцию Ляпунова в виде потенциальной поверхности [11]. Исследование робастной устойчивости системы управления с неопределенными параметрами основывается на теореме об асимптотической устойчивости.
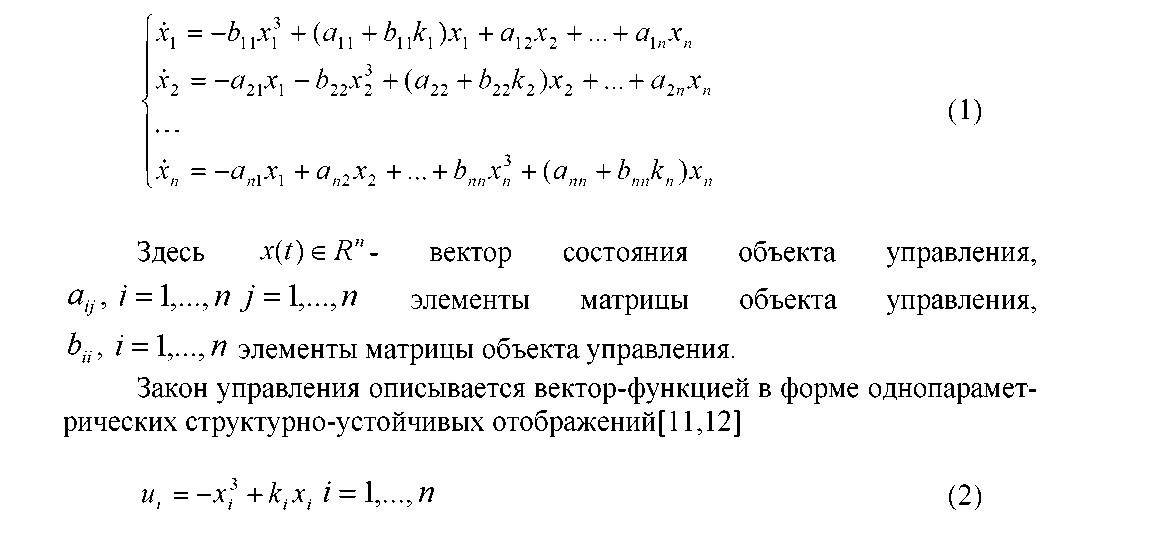
Пусть система (1) в развернутой форме записывается в виде
52
53
54
55
56
В практических задачах, связанных с конструированием и моделированием процессов управления в технике, экономике, биологии и других сферах в условиях существенной параметрической неопределенности повышенный потенциал робастной устойчивости является одним из ключевых факторов гарантирующих системе управления от попадания хаотическому движению и гарантирует применимость моделей и надежность работы спроектированных систем управления.
ПРИМЕР
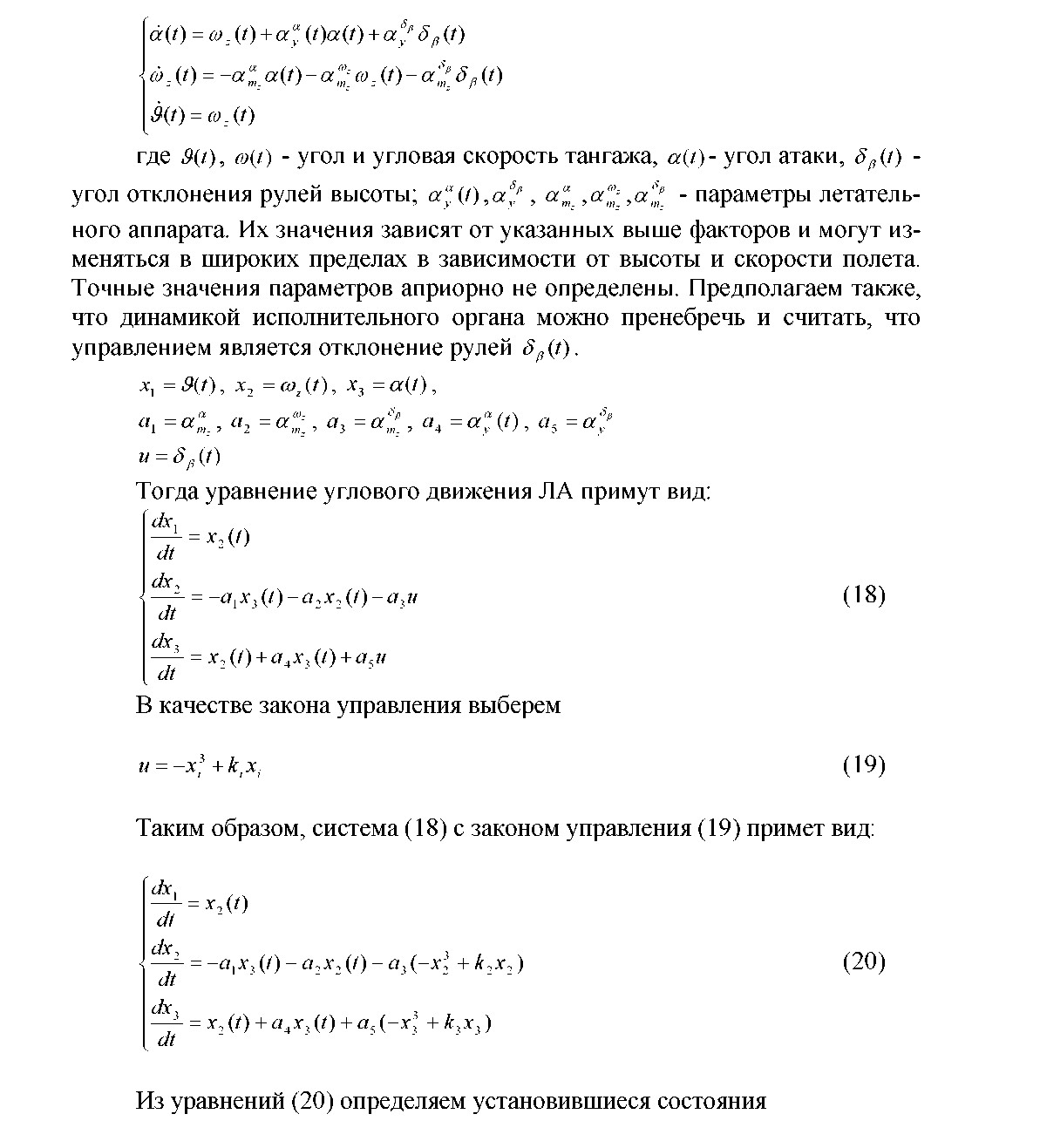
Исследуем задачу управления движением летательного аппарата (ЛА) по тангажу. Пусть ЛА имеет постоянные, априорно-неопределенные параметры, значения которых лежат в заданной области. Заметим, что подобная
57 ситуация может иметь место при полете на различных режимах, когда высота, скорость и нагрузка ЛА изменяется медленно по сравнению с темпом угловых движений. Для описания динамики углового движения ЛА используем следующие линеаризованные уравнения[6,24]:
58
59
60
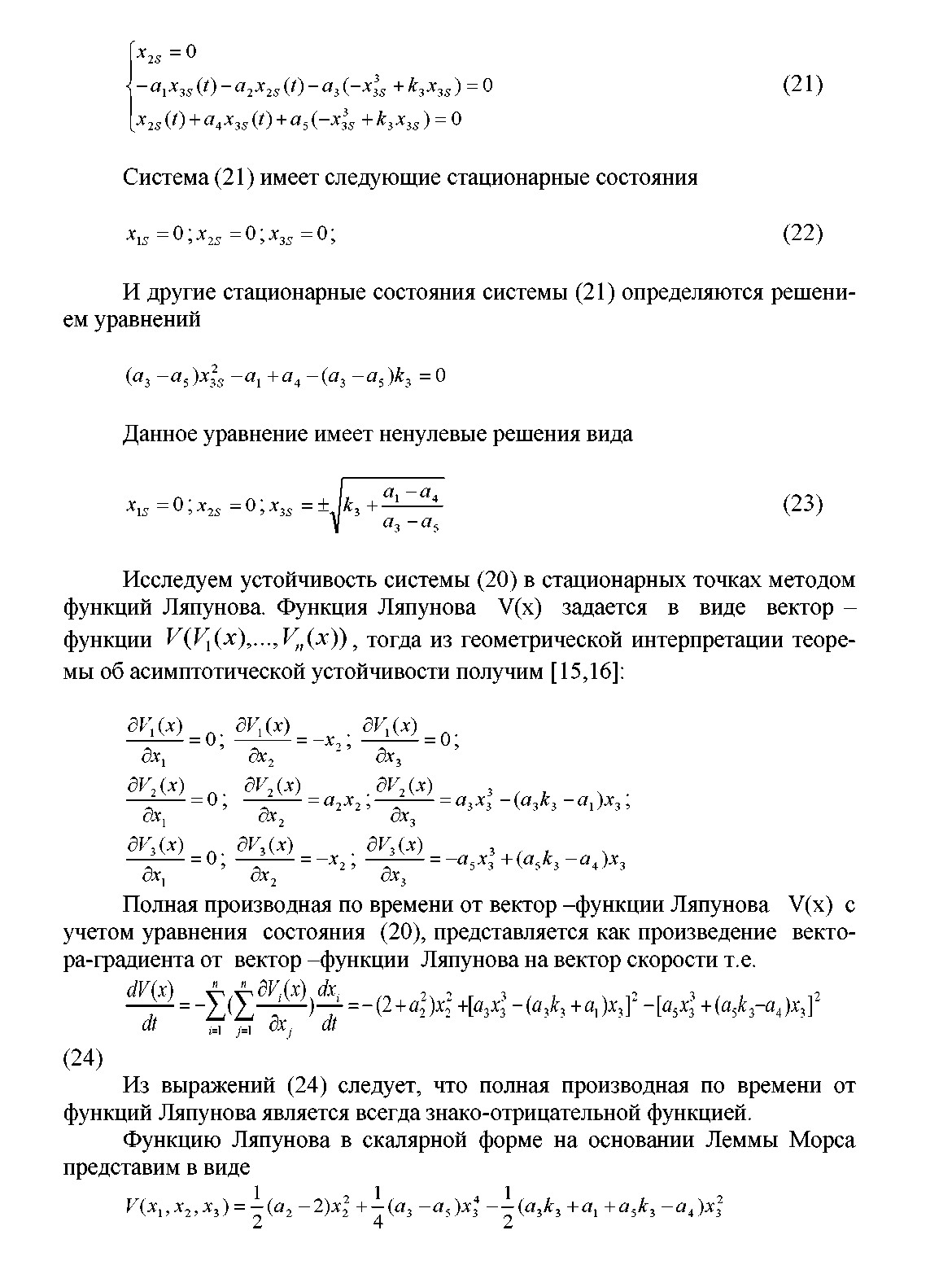
Отсюда, необходимым и достаточным условием устойчивости стационарного состояния (23) системы (20) является выполнение неравенства (30).
Таким образом, система упарвления движением ЛА с повышенным потенциалом робастной устойчивости, построенная в классе однопараметрических структурно-устойчивых отображений обеспечивает устойчивость при любых изменениях неопределенных параметров системы.
Оказывается, стационарное состояние (22) является глобально асимптотически устойчивым при выполнении условий (25) и неустойчивым при нарушении условий (25), а для устойчивости стационарного состояния (23) требуется выполнение условий (30). При k3 +a—ɑ∣ = 0 происходит раз- a3 - а, ветвление и появляются новые устойчивые ветви.
Иными словами, ветви (23) появляются в результате бифуркации в тот момент, когда стационарное состояние (22) теряет устойчивость, причем сами эти ветви устойчивы. Стационарные состояния (22) и (23) одновременно не существуют. Это позволяет увеличить потенциал робастной устойчивости системы в условиях неопределенности параметров.
ЛИТЕРАТУРА
- Поляк Б.Т., Щербаков П.С. Робастная устойчивость и управление. -М.: Наука. 2002.-303с.
- DozatoP.,Vedavalli Recent Advances in Robust Control.- NewYork:IEEpress 1990
- Liao X., Yu P. Absolute stability of nonlinear control systems. – New York: Springer Science. BusinessMediaB.V., 2008 – pp. 390.
- Кунцевич В.М. Управление в условиях неопределенности. Гарантированные результаты в задачах управления и идентификации. – Киев: Нау- ково-думка, 2006 – 264 с.
- Лоскутов А.Ю. Михайлов А.С. основы теории сложных систем – М. Ижевск: Институт компьютерных исследований, 2007 – 620 с.
- Андриевский Б.Р., Фрадков А.Л. Избранные главы теории автоматического управления с применением на языке Mathlab. – СПб.: Наука 1999 – 467 с.
- GregoireNicols, Ilya Prigogine. Exploring Complexity an Introduc- tion.-New York: W.H. Freeman&Co., 1989.
- Бейсенби М.А., Ержанов Б.А. Системы управления с повышенным потенциалом робастной устойчивости. - Астана, 2002.-164 с.
- Бейсенби М.А. методы повышения потенциала робастной устойчивости систем управления. - Астана, 2011.-352с.
- Бейсенби М.А. Модели и методы системного анализа и управление детерминированным хаосом в экономике. Астана, 2011,-201 с.
- Гилмор Р. Прикладная теория катастроф. В 2-х томах. Т.1.- М.:Мир, 1984
- Постон Т., Стюарт И. Теория катастроф и ее приложения.- М.: Наука, 2001, № 6.
- Beisenbi M.A. A construction of extremely robust stable control system // ДокладыМН – АНРК. – 1998-№1, с 41-44.
- Ашимов А.А., Бейсенби М.А. Робастность систем управления и структурно-устойчивые отображения// Доклады НАН РК – 2000 - №6, с 2832.
- Малкин И.Г. Теория устойчивости движения М.: Наука, 1966.540
- Барбашин Е.А. Введение в теорию устойчивости - М.: Наука 1967.-225 с.
- Красовский Н.Н. Некоторые задачи теории устойчивости движения. М. :Физматгиз., 1959.
- Воронов А.А., Матросов В.М. Метод векторных функций Ляпунова в теории устойчивости -М.: Наука 1987.-312 с.
- Beisenbi M., Uskenbayeva G.The New Approach of Design Robust Stability for Linear Control System.Proceeding of the International Conference on Advances in Electronics and Electrical Technology. AEET, 04-05 January, 2014.
- BeisenbiM.,Yermekbayeva J., The Research of the Robust Stability in Dynamical System. // International Conference on Control, Engineering & Information Technology (CEIT13), Sousse , Tunisia , 2013.-Proceedings of IPCO.- P.142-147.
- Бейсенби М.А., Ермекбаева Ж.Ж. Построение функции Ляпунова в исследовании робастной устойчивости линейных систем. // Вестник КазНТУ им.К.Сатпаева. Научный журнал Казахского национального технического университета.- Алматы,2013.-№1.-С 315-320.
- Бейсенби М.А., Ускенбаева Г.А. Метод функции А.М. Ляпунова в исследовании робастной устойчивости лшинейных систем управления с одним входом и одним выходом. Труды международной научнопрактической конференции «Информационные и телекоммуникационные технологи: Образование, наука, практика». Алматы. КАЗНТУ имени К.И. Сатпаева. 274-277 стр.
- Beisenbi M.A., Abdrakhmanova L.G. Research of dynamic properties of control systems with increased potential of robust stability in a class of two- parameter structurally stable maps by Lyapunov function. //International Conference on Computer, Network and Communication Engineering (ICCNCE 2013).- PublishedbyAtlantisPress, 2013.-P.201-203.
- Буков В.Н. Адаптивные прогнозирующие системы управления полетами. М.: Наука, 1987, 230 с.