Для увеличения эффективности функционирования железнодорожного транспорта необходимо использование систем интеллектуальной поддержки принятия решении. Это позволяет существенно поднять эффективность принятия решения за счет оптимизации последовательности задач маршрутизации и правильности реализации автоматизированных контролирующих си ст ем движения поезда.
Для повышения эффективности функционирования железнодорожного транспорта необходимо внедрение систем, имеющих не просто более совершенные характеристики, а обладающих принципиально новыми функциональными возможностями.
Одним из направлений совершенствования систем управления является передача от человека машине некоторых функций, носящих интеллектуальный характер. Применение подсистем интеллектуальной поддержки принятия решений позволит существенно повысить эффективность принятия решений. Применение интеллектуальных методов при принятии решений в задачах управления определяется сложностью формализации динамических процессов на железнодорожном транспорте.
Данная статья посвящена разработке метода интеллектуальной поддержки принятия решений на этапе внедрения распределенных автоматизированных систем управления. Принятие решений осуществляется в результате оптимизации распределенных систем [1].
Фитнес-функция определяется как сумма затрат на реализацию строительно-монтажных работ и последующих эксплуатационных расходов.
Метод оптимизации распределенных систем на основе совместного решения задач размещения, назначения и выбора маршрута состоит из следующих частей [2]:
- Выбирается текущий объект контроля.
- Выбирается текущее место для установки блока первичной обработки сигналов.
- Определяются возможные варианты соединения объекта контроля и места для установки блока первичной обработки сигналов.
- Рассчитываются затраты для каждого варианта соединения и выбирается вариант с минимальными затратами.
- Шаги 1-4 повторяются для всех объектов контроля и мест для установки блоков первичной обработки.
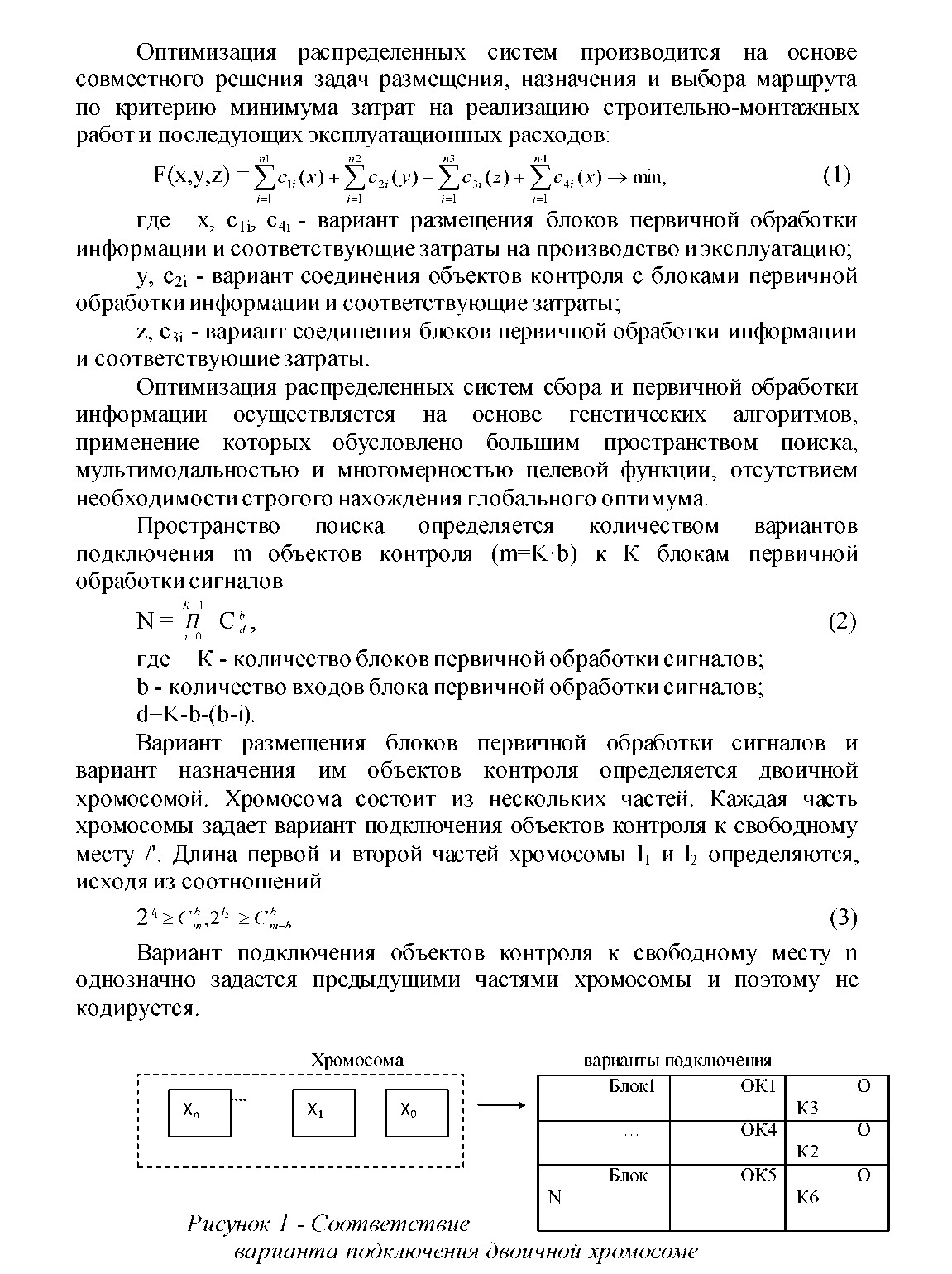
- Формируется хромосома, определяющая вариант размещения блоков первичной обработки сигналов и вариант назначения объектов контроля.
- Определяется маршрут соединения блоков первичной обработки сигналов с минимальной длиной и вычисляются затраты на его реализацию.
- Шаги 6-7 повторяются до окончания формирования популяции.
- Для формирования новой популяции выполняются операции отбора, скрещивания и мутации.
- Вычисляется фитнес-функция, которая учитывает затраты на установку блоков первичной обработки сигналов, подключение объектов контроля, соединение блоков первичной обработки сигналов, а также эксплуатационные расходы.
- Повторяются шаги 9-10 для всех особей.
- Шаги 9-11 повторяются до выполнения максимального количества циклов.
После расположения оборудования необходимо проверить правильность выполнения управляющих функций системы. Для решения задачи выбора последовательности проверки управляющих функций автоматизированных систем также используются генетические алгоритмы.
Количество поездных маршрутов на станции складывается из маршрутов приема, отправления, передачи с пути на путь и маршрутов сквозного пропуска:
b
n= ∑ ((PmιPk) + (PkPqi) + (PmiPkPqp)), (4)
i =1
где n - количество маршрутов на станции;
b=2 - количество направлений движения (четное и нечетное);
Pmi - количество подходов к станции с направления i,
Pk - количество путей на станции,
Pqi - количество путей движения от станции в направлении i.
40
Метод оптимизации последовательности задания маршрутов при проверке правильности реализации управляющих воздействий во время проведения пусконаладочных работ автоматизированных систем контроля и управления реализован в виде программы и состоит из следующих шагов:
- Фиксируется начальное положение стрелок.
- На основании данных о количестве маршрутов производится расчет длины хромосомы.
- Формируется начальная популяция.
- Текущему положению стрелок присваивается начальное состояние.
- Текущей хромосоме присваивается значение первой хромосомы.
- Т екущему маршруту присваивается значение первого маршрута, определяемого из текущей хромосомы.
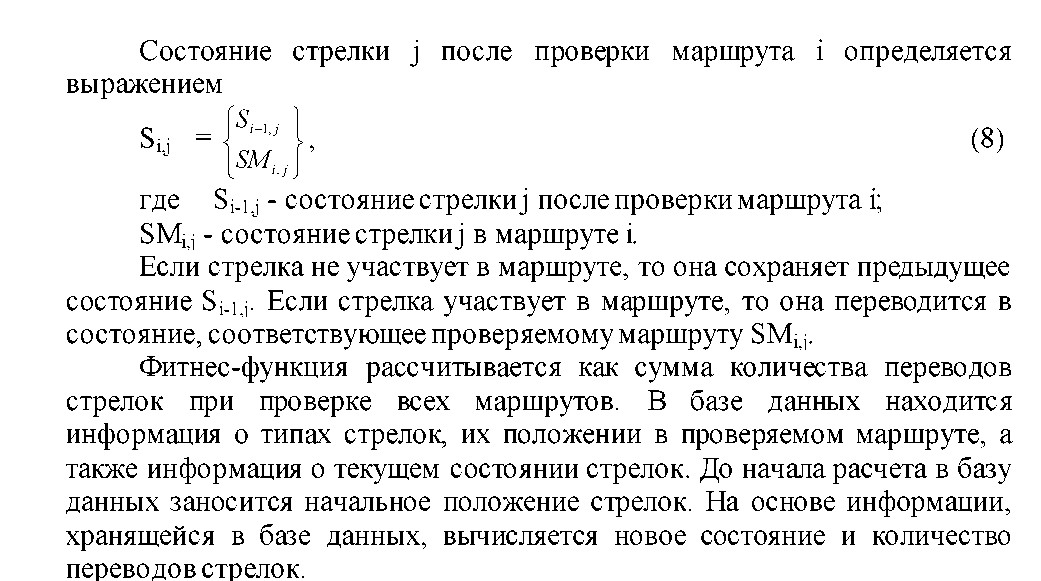
- Исходя из текущего состояния стрелок и номера текущего маршрута, вычисляются:
- количество переводов стрелок для проверки текущего маршрута;
- новое текущее состояние стрелок.
- Текущему маршруту присваивается значение следующего маршрута.
- Шаги 7-8 повторяются для всех маршрутов, описанных текущей хромосомой.
- На основании количества переводов стрелок осуществляется вычисление значений фитнес-функции.
- Текущей хромосоме присваивается значение следующей хромосомы из популяции.
- Шаги 6-11 повторяются для особей всей популяции.
- Популяция подвергается операциям селекции, скрещивания и мутации.
- Если количество итераций не превысило установленный предел, то осуществляется переход к пункту 5.
- Из популяции выбирается особь, имеющая максимальное значение фитнес-функции.
В заключение следует отметить, что применение подсистем интеллектуальной поддержки принятия решений позволит существенно повысить эффективность принятия решений за счет оптимизации последовательности задания маршрутов при проверке правильности реализации управляющих воздействий автоматизированных систем контроля и управления движением поездов.
ЛИТЕРАТУРА
- Баймухамедов М.Ф., Тогжанова Г.О. «Информационные технологии в управлении транспортом». /Материалы Республиканской научно-практической конференции «Современные аспекты информатизации производства, науки и образования». Костанай, 2006 - С. 9-12.
- Тогжанова Г.О. К вопросу об оптимизации грузоперевозок железнодорожным транспортом. /Материалы Международной Интернет - конференции « Проблемы и перспективы конкурентоспособной национальной экономики».Костанай, 2007. - С.453.