Современные энергетические системы характеризуются концентрацией огромных мощностей на отдельных станциях, передачей энергии на большие расстояния, параллельной работой многих станций на общую нагрузку. Создание объединенных энергосистем приводит взаимосвязи электрических станций в масштабе всей страны.
Потребители предъявляют высокие требования к электрической энергии. Такие качественные показатели электрической энергии как частота и напряжение должны поддерживаться на строго заданном уровне. Все потребители заинтересованы в бесперебойности электроснабжения. Ряд из них выдвигает очень высокие требования в отношении надежности электропитания.
Начавшиеся в Казахстане в конце 20-го века экономические преобразования вызвали из-за разрыва производственных связей с другими странами СНГ спад промышленного производства, который обусловил уменьшение суммарного потребления электроэнергии более чем в 2 раза. Снижение электропотребления в удаленных районах обусловило появление малонагруженных воздушных линий электропередач большой протяженностью напряжением 110 кВ и выше, которые генерируют реактивную мощность. Происходит нарушение баланса реактивной мощности, который является критерием уровня напряжения в рассматриваемой точке. Снижение мощности станций и тока возбуждения генераторов при неоптимальной настройке регуляторов (АРВ-СД) приводит даже при незначительных возмущениях в системе к взаимным колебаниям роторов генераторов, что ухудшает условия статической и динамической устойчивости, а также качества электроэнергии. При этом существенно увеличиваются потери электроэнергии.
Проблема оптимального выбора и настроек АРВ-СД, удовлетворяющих требованиям переходных процессов параллельно работающих генераторов и станций приобретает первостепенное значение.
Качество регулирования зависит от параметров всех элементов, входящих в САР, в том числе от параметров регулятора и объекта регулирования. При групповом управлении несколькими генераторами точность распределения реактивной нагрузки зависит от характеристик регуляторов и возбудителей различных генераторов и точности настроечных параметров регулирования.
Регулируемая электрическая система представляет собой сложную нелинейную электромеханическую колебательную систему. Основными качественными особенностями динамических свойств такой системы являются:
-многочастотность колебаний с существенно различными частотами и коэффициентами затухания;
-зависимость характера движения от исходных режимов и параметров системы, от настроечных параметров устройств регулирования;
-зависимость степени проявления частотных составляющих от места приложения возмущения;
-зависимость динамических свойств системы от величины возмущения.
Динамические свойства системы определяют по виду протекания свободного переходного процесса во времени. Этот метод наиболее известный, реализуемый численным интегрированием системы нелинейных дифференциальных уравнений, не дает возможности получения каких-то общих закономерностей и точности. Методы определения параметров форм движения и методы, основанные на частотных характеристиках, позволяют установить закономерности переходных процессов в сложной системе.
Для определения параметров форм движения использовать метод, основанный на приведении уравнений переходных процессов для каждого генератора к эквивалентному уравнению второго порядка и определении параметров электромеханических форм колебаний, основанный на расчете итерационными методами. Этот метод позволяет определить приближенные эквивалентные параметры собственной частоты и коэффициента затухания.
В связи с необходимостью обеспечить требуемое качество электроэнергии у потребителя за счет действия систем автоматического управления предложены следующие принципы математического моделирования микроэнергосистемы:
- Микроэнергосистема используется одновременно в составе нескольких энергоблоков для исследования взаимного влияния генераторов и систем автоматического управления при различных вариантах параллельной работы.
- Микроэнергосистема используется одновременно как для автономной работы, так и для работы на мощную сеть.
- Микроэнергосистема используется совместно с СЭС, конфигурация и состав элементов которой может изменяться произвольным образом.
- Моделируются не только статические, но и динамические режимы работы микроэнергосистемы.
Поскольку возникает задача моделирования различных конфигураций микроэнергосистем, различающихся по числу энергетических установок и вариантам СЭС.
Для ее решения необходима методика построения сложной математической модели СЭС универсальной структуры. Универсальность структуры означает, что, во-первых, предлагаемая методика позволяет реализовать произвольную конфигурацию моделируемой системы, а, во- вторых, предлагаемая методика является «модельно-независимой» [2], т.е. она применима для разнообразных типов математических моделей структурных элементов.
Математическая модель СЭС включает в себя большое количество взаимосвязанных линейных и нелинейных дифференциальных и алгебраических уравнений, помимо этого, математическая модель должна учитывать изменения в топологии, в направлении передачи энергии и отвечать ряду других разнообразных, зачастую противоречивых требований.
Как известно, сложная математическая модель состоит из моделей структурных элементов и модели их взаимодействия [3]. Для того чтобы представить математические модели всех структурных электрически- взаимодействующих элементов в единой обобщенной форме запишем математическую модель каждого структурного элемента в координатах Парка-Горева, а затем преобразуем математические модели элементов к единообразной векторно-матричной форме записи.
Математические модели всех структурных элементов СЭС представим в единой обобщенной форме в виде следующего векторноматричного уравнения:
pI = ±AU - BI - H,
(1)
где I, pI - вектор токов и вектор производных токов элемента;
U - вектор напряжений, приложенных между внешними зажимами элемента;
A, B - матрицы, размерность которых зависит от системы координат в которых моделируется структурный элемент, а также от того полные это уравнения или упрощенные;
H - вектор, определяющий воздействие на элемент со стороны средств регулирования электрических параметров;
p - символ дифференцирования;
знак «-» означает, что структурный элемент является источником электрической мощности (генератором), знак «+» - потребителем.
Компоненты вектора H, связанные с внешним воздействием на элемент, для пассивных элементов электрической системы - нулевые, для синхронных машин - меняются на каждом шаге расчета.
Следует отметить, что современные программно-аппаратные средства моделирования позволяют без особых проблем реализовать модели элементов не только в системе вращающихся координат Парка- Горева d, q, но и в естественной фазной системе координат a, b, c. Причем элементы, моделируемые в разных системах координат, могут объединяться между собой для совместного расчета в рамках единой модели с помощью известных матриц преобразования координат. При реализации динамической модели уравнения (1) решаются на каждом шаге расчета методом численного интегрирования относительно внешних токов структурного элемента. Для пассивных элементов выражение (1) содержит всю систему дифференциальных уравнений элемента. Для электрических машин уравнения (1) следует интегрировать совместно с уравнениями
роторных контуров, уравнениями, описывающими механическое состояние элемента, и уравнениями, описывающими действие систем автоматического регулирования. Знаки при слагаемых уравнения (1) соответствуют нормальному направлению токов в электрических машинах (от генератора к узлу). Математическую модель для расчета установившегося режима получаем из уравнений (1), принимая — = 0.
dt
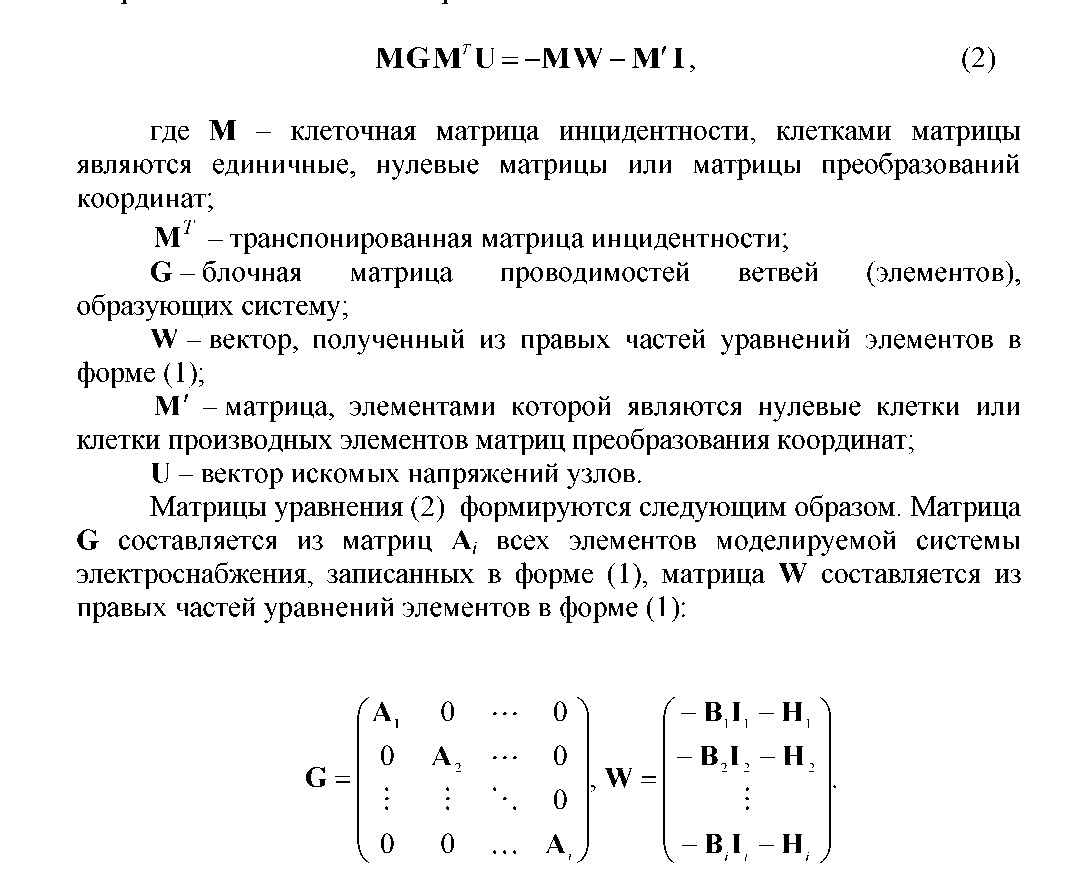
Вслед за математическими моделями отдельных элементов необходимо построить модель их взаимодействия, которая должна отражать состав элементов и топологию ЭЭС. Математическая модель взаимодействия структурных элементов использует матрицу инцидентности, отражающую топологию рассматриваемой локальной системы электроснабжения. Представим взаимодействие элементов в виде следующего векторно-матричного уравнения для определения узловых напряжений на каждом шаге расчета
Математическая модель обеспечивает расчет всех узловых напряжений системы электроснабжения по векторно-матричному уравнению (2) на текущем шаге расчета. Вслед за этим вновь решаются
78
дифференциальные уравнения элементов (1) и находятся мгновенные значения токов каждого элемента. Процесс повторяется, требуемое число раз в течение всего расчета. В результате рассчитываются переходные процессы всех режимных параметров СЭС.
Конфигурация моделируемой системы электроснабжения изменяется за счет внесения изменений в матрицу инцидентности M уравнения (2). В результате пользователь имеет возможность формировать различные конфигурации моделируемых СЭС: автономных и неавтономных. Таким образом, один и тот же алгоритмический аппарат используется для моделирования автономных СЭС и систем, работающих на мощную сеть. В последнем случае в состав системы должен быть включен специальный элемент, который имитирует мощную сеть.
Сочетание для определения параметров форм колебаний при заданной настройке АРВ генераторов системы и D-разбиения дают возможность оценить управляемость формами колебаний в системе. Если какая-то форма колебаний является слабо демпфированной или неустойчивой, то такой анализ позволяет выявить тот АРВ, настройка которого «управляет» этой формой колебаний, и изменением настройки можно добиться улучшения демпфирования этой формой колебаний.
Применение математической модели для расчета параметров электромеханических и электромагнитных колебаний многомашинной системы дает полное представление о переходном процессе в системе и обеспечивает высокую точность при выборе оптимальных настроек регуляторов.
Литература
- Желокова М.З., Максимова И.Р. Прогноз мощностных показателей высокооборотных генераторов с предельной степенью использования для малой энергетики // Известия РАН. Энергетика. – 2008. – № 6. – С. 127 – 131.
- A Genetic Algorithm Śоİиţİоп to the Govemor-Turbrne Dynamic Model Identification in Multi-Machine Power Systems / G. Stefopoulos. - In: Proceedings of the IEEE Conference on Decision and Control, Bd. 2 (2005), S.1288-1294.
- Бусленко Н. П. Моделирование сложных систем. М.: Наука, 1978. – С.440.
- Кэнту М. Delphi 7: Для профессионалов// СПб.: Питер, 2004. – С.1101.