Рассматриваются пути оптимизации управления светофорными объектами при улично-дорожном движении таким образом, чтобы минимизировать задержки транспорта, обеспечивая на них наилучшее распределение транспортных потоков. Предлагается создание автоматизированных систем управления дорожным движением с применением искусственного интеллекта.
Введение
В последние десятилетия в развивающихся странах, в том числе в странах СНГ, наблюдается интенсивный рост уровня автомобилизации населения, связанный с ростом уровня доходов граждан. Количество автомобилей на улицах крупных городов растет. При этом существующая улично-дорожная сеть (УДС) перестает справляться с оказываемой на нее нагрузкой, а темпы ее развития не успевают за темпом роста уровня автомобилизации.
Пропускная способность улично-дорожной сети падает, особенно остро это сказывается в ее узлах – перекрестках. Здесь появляются скопления автотранспорта, образуются заторы. Такая ситуация вызывает комплекс проблем: повышенный расход топлива, износ узлов и агрегатов автомобилей, повышенная эмиссия выхлопных газов. Все это в свою очередь ведет к повышенным финансовым затратам: простои транспорта в пробках влекут рост издержек на перевозки, а плохая экология вызывает снижение здоровья, и как следствие, повышение затрат на медицинское обслуживание горожан.
Данная проблема бросает вызов развитию современных городов, что ставит задачу сокращения простоев транспорта в пробках. Очевидно, что без расширения и развития улично-дорожной сети, путем строительствановых дорог и расширения старых, возведения развязок и эстакад, полноценное движение становится невозможным. Однако этот подход требует больших временных затрат и является работой на перспективу.
Помимо долгосрочных проектов развития УДС необходимы и такие меры, которые дадут результат в короткие сроки. К таким мерам относится внесение изменений в схемы организации дорожного движения (ОДД): введение одностороннего или реверсивного движения, выделение полос для общественного транспорта, ограничение движения определенных видов транспорта на отдельных участках УДС. Однако такие организационные методы зачастую вносят сложности и снижают эффективность использования существующей улично-дорожной сети, увеличивая общее время нахождения автотранспортных средств в пути.
Как правило, большая часть простоев транспорта вызывается заторами перед перекрестками, поэтому наиболее целесообразно искать решение повышения пропускной способности УДС путем оптимизации управления светофорными объектами (СО) таким образом, чтобы минимизировать задержки транспорта, обеспечивая на них наилучшее распределение транспортных потоков.
Опыт зарубежных городов показывает, что одной из наилучших мер по увеличению эффективности использования существующих перекрестков, направленное на устранение проблем транспортной сети города, на сегодняшний день является создание автоматизированных систем управления дорожным движением (АСУ ДД). АСУ ДД – это комплекс технических, программных и организационных мер, обеспечивающих сбор и обработку информации о параметрах транспортных потоков и на основе этого оптимизирующих управление движением. Управление движением в АСУ ДД организовано по иерархическому принципу и осуществляется на трех основных уровнях: отдельно стоящие светофорные объекты (уровень локального управления) объединяются в маршруты (группы последовательно расположенных СО – тактический уровень); маршруты в свою очередь объединяются в районную или городскую сеть (стратегический уровень).
Применение искусственного интеллекта в управлении дорожным движением.
В классификации систем управления дорожным движением выделяют особый вид систем, называемый интеллектуальными АСУ ДД, в которых осуществляется автоматический сбор данных о параметрах транспортных потоков посредством детекторов транспорта. Получаемая таким образом обратная связь используется для оперативной коррекции параметров светофорного регулирования, т.е. система выполняет гибкое, или адаптивное управление [1]. Таким образом, в строгой терминологии теории управления такие системы правильнее было бы назвать адаптивными, так как интеллектуальные системы управления – это системы, в которых применяются интеллектуальные методы сбора и обработки информации (такие как нечеткая логика, генетическиеалгоритмы, искусственные нейронные сети, а также комбинации этих методов).
Такой подход позволяет более эффективно распределять транспортные потоки на перекрестке, путем оперативного изменения параметров светофорного регулирования. Это снижает время ожидания для транспортных средств и, следовательно, повышает пропускную способность отдельно взятого перекрестка.
С развитием технологий искусственного интеллекта (ИИ) расширяется область их применения. Сегодня методы ИИ применяется в различных системах и устройствах, от бытовой техники до космической отрасли. Ведутся также и разработки по внедрению искусственного интеллекта в системы моделирования транспортных потоков и управления дорожным движением.
Зачастую АСУ ДД располагает неполной или неточной информацией о параметрах транспортных потоков в связи с недостаточным количеством детекторов транспорта и их низкой точностью. Решать задачи управления в условиях неполноты информации позволяет применение в системах управления нечетких регуляторов, работа которых основывается на теории нечетких множеств [2]. Одним из инструментов, позволяющих проектировать нечеткие регуляторы, является среда программирования MATLAB с расширением Fuzzy Logic Toolbox [3].
Построение модели объекта управления.
Авторами рассматривается задача разработки нечеткого регулятора для оптимизации управления светофорным объектом с целью минимизации количества автомобилей, ожидающих проезда через перекресток.
Для проведения экспериментов с моделью нечеткого регулятора, создаваемого средствами среды программирования MATLAB, авторами построена модель движения транспорта на перекрестке. Для моделирования выбрано пересечение двух дорог с максимально возможным количеством направлений движения (ранее авторами предлагалось построение модели существующего перекрестка с меньшим количеством параметров [4]; также решение аналогичной задачи в простой постановке, включающей пересечение двух дорог с одной полосой в каждом направлении движения, было предложено в [5]). Изображение окна программы в процессе моделирования представлено на рисунке 1. В каждый момент работы программа отображает сигналы светофоров на перекрестке и количество автомобилей, ожидающих проезда перед стоп- линией.
Как видно из рисунка, движение по каждому из возможных направлений организовано по отдельной полосе. Такая схема выбрана по той причине, что изменяя входные параметры, а именно количество автомобилей, подходящих к перекрестку по каждой из полос движения, можно изменить конфигурацию моделируемого светофорного объекта: задавая нулевую численность автомобилей, можно исключить из модели ту или иную полосу. Таким образом создается модель перекрестка произвольной конфигурации.
В созданной модели для упрощения вычислений движение транспорта дискретизировано таким образом, что за каждый заданный промежуток времени количество автомобилей, ожидающих проезда на каждой из полос, с некоторой вероятностью увеличивается на единицу. Одновременно с этим за каждый заданный интервал горения разрешающего сигнала количество автомобилей, ожидающих у стоп-линии на соответствующей полосе, уменьшается на единицу.
На рисунке 2 представлена схема организации движения на моделируемом перекрестке.
Проезд перекрестка транспортными средствами организован в четыре фазы таким образом, чтобы обеспечить бесконфликтное движение транспортных потоков в каждой из фаз. В фазе №1 происходит проезд перекрестка правоповоротными потоками и потоками, движущимися в прямом направлении, а также пропуск пешеходных потоков по улице «север-юг». В фазе №2 прекращается движение едущих прямо автомобилей, и включается зеленый сигнал для левоповоротных потоков. Фазы № 3 и № 4 повторяют описанную для улицы «север-юг» схему движения для соответствующих направлений улицы «восток-запад».
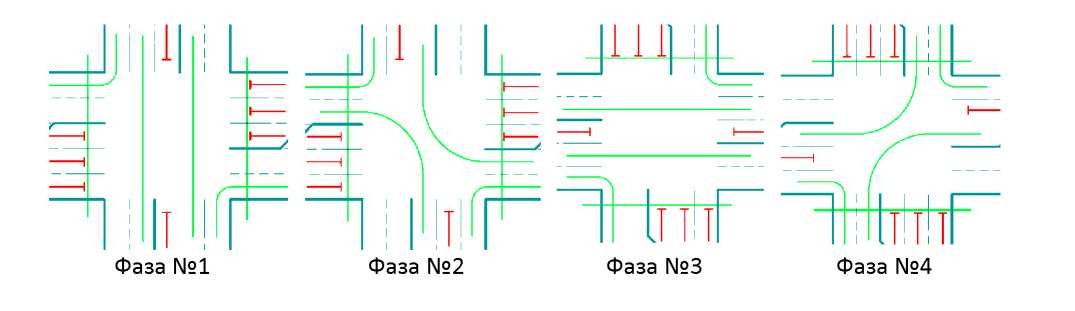

Рисунок 2 - Схема организации движения на моделируемом перекрестке
Авторами предлагается использование нечеткого регулятора для управления длительностью основных тактов (разрешающих сигналов) светофорного цикла путем продления текущего такта в случае его востребованности. Уровень востребованности фазы светофорного цикла определяется сравнением загруженности направлений движения на перекрестке.
Проектирование нечеткого регулятора
Так как временные характеристики работы светофора, выступающие в качестве выходных переменных процесса управления, являются дискретной величиной, в модели предлагается применение нечеткого регулятора, использующего упрощенный алгоритм нечеткого вывода типа Суджено [6].
Выходная переменная в рассматриваемом случае будет одна, так как регулятор изменяет длительность только текущего такта. В качестве входного параметра проектируемого нечеткого регулятора принято количество автомобилей, ожидающих проезда перекрестка перед стоп- линией, так как на первом этапе целью исследования ставится минимизация количества автомобилей на перекрестке. При таком подходе и при использовании описанной выше схемы ОДД в качестве входного параметра можно использовать сумму количества автомобилей, движущихся во встречных направлениях, так как они бесконфликтно пропускаются в одной фазе. Таким образом, в описываемой модели будет шесть входных переменных.
Каждому входному и выходному параметру процесса управления присваивается степень принадлежности некоторой лингвистической переменной. Терм-множества лингвистических переменных могут иметь различное количество термов.
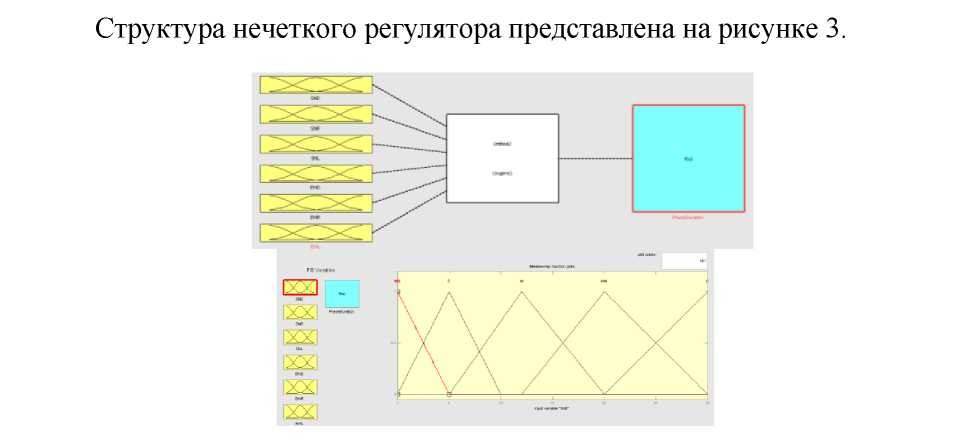
Рисунок 3 - Структура нечеткого регулятора в окне расширения Fuzzy Logic Toolbox (слева) и структура одной из входных переменных (справа)
На следующем этапе создания нечеткого регулятора формируется база знаний, состоящая из правил, устанавливающих зависимости между термами входных и выходных лингвистических переменных. Соответственно, количество правил пропорционально количеству переменных. Для случая шести входных переменных и одной выходной, каждая из которых состоит из пяти термов, общее число всех возможных для нечеткого регулятора правил равняется 15625. Использование экспертного метода построения базы знаний системы нечеткого вывода при таком количестве правил затруднительно, поэтому в работе предлагается использовать комбинированный метод, включающий экспертные знания и интеллектуальную систему извлечения знаний, основанную на генетических алгоритмах [7].
На основании экспертных знаний задаются параметры и количество термов входных и выходных переменных процесса регулирования (см. рисунок 3 справа).
При создании базы знаний нечеткого регулятора задаются все возможные комбинации правил, устанавливающих связи между входными и выходными лингвистическими переменными. Настраиваемыми параметрами нечеткого регулятора выступают весовые коэффициенты правил. Вектор весовых коэффициентов можно рассматривать как особь или хромосому для генетического алгоритма.
В качестве целевой функции при поставленной задаче минимизации количества автомобилей целесообразно использовать число автомобилей, ожидающих проезда перекрестка. При этом, к суммарному значению числа автомобилей, ожидающих проезда в текущем такте, прибавляется количество автомобилей, не успевших пересечь перекресток в предыдущем цикле светофорного регулирования (т.е. те, которые ожидают проезда более одного цикла).
Применение стратегии элитизма, скрещиваний и мутаций на некоторой популяции (совокупности векторов весовых коэффициентов) на протяжении определенного числа поколений (цикла) позволяет получить некоторый локальный минимум целевой функции. По завершении первого цикла производится контрастирование: близкие к нулю и единице весовые коэффициенты округляются соответственно до нуля и единицы. В дальнейших циклах их значения фиксируются. Фактически, обнуление весового коэффициента означает вычеркивание этого правила из базы знаний. После этого алгоритм повторяется еще несколько циклов, после каждого из которых производится контрастирование. Таким образом, после нескольких циклов алгоритм приводит к получению нечеткого регулятора, осуществляющего достаточно качественное управление распределением транспортных потоков на перекрестке.
Заключение
Построение описанной системы позволяет оценить эффективность решения задачи управления дорожным движением методами искусственного интеллекта: применением нечеткой логики для управления параметрами светофорного регулирования и генетических алгоритмов для оптимизации параметров нечеткого регулятора. Работа частично поддержана грантами РФФИ No.No. 11-07-00245-а и 12-07-13116- офи_м_РЖД.
ЛИТЕРАТУРА
- Кременец Ю.А., Печерский М.П., Афанасьев М.Б. – Технические средства организации дорожного движения: Учеб. для вузов. – Москва: ИКЦ «Академкнига», 2005. – С.279.
- Р.А. Алиев. Управление производством при нечёткой исходной информации. – Москва: Энергоатомиздат, 1991. – 240 с.
- В. Дьяконов, В. Круглов. – Математические пакеты расширения MATLAB. Специальный справочник. – Санкт-Петербург: Питер, 2001. – С.480.
- Мезенцев И. С., Тарасян В. С. Применение адаптивного управления светофорным объектом для минимизации задержки транспортных средств // Вестник науки Костанайского социально-технического университета имени академика Зулхарнай Алдамжар. — Костанай : КСТУ, 2012. — № 3 — С. 98–105.
- Вовк О.Л., Федяев О.И. Исследование алгоритмов нечёткого вывода в системах управления трудноформализуемыми объектами. // Сборник трудов магистрантов Донецкого национального технического университета. – Донецк. ДонНТУ Министерства образования и науки Украины, 2002. – Вып. 1. – С. 895-903.
- Леоненков А.В. Нечеткое моделирование в среде MATLAB и fuzzyTECH : Санкт-Петербург: БХВПетербург, 2005. С.736.
- В.С. Тарасян, И.В. Куликова. Разработка процедуры построения нечеткого регулятора и ее применение для управления движением перевернутого маятника // Вестник Уральского государственного университета путей сообщения, 2-13. - № 1(17). - С. 34–42.