Мақала оқу үдерісінде роботтық техникалық жүйелерді қолдану ерекшеліктерін зерттеуге бағытталған. Жалпы жасанды интеллекттің қалыптасу кезеңдері сипатталып, бұл саланы меңгеруде адамзат алдындағы ашылатын жаңа мүмкіндіктері болжанды. Еңбекті автоматтандыруда роботтық техниканы қолдану нəтижелері келтірілген. Автор білім беру үдерісінде роботты техниканы қолданудың өзектілігін көрсетті. Білім беру үдерісінде роботтық техника үш бағытқа бөлінеді (білімділік, жарысатын жəне шығармашылық). Білім алушылар жарысатын бағытқа айқын түрде қызығушылығын білдіріп жатқандығы нақтыланады, ал білімділік бағыты жанама түрде тек техникалық бағытпен айқындалады. Сонымен қатар Lego Mindstorms жиынтығымен жұмыс жасау технологиясы сипатталады. Жəне де биотехникалық, автоматты жəне интерактивті түрлері бойынша бөлінетін роботтық техникалық жүйелерді басқару ерекшеліктері қарастырылды. Роботты басқару əдістерін дамытуда техникалық кибернетика жетістіктері мен автоматты басқару теориясы өте маңызды екені айтылды. Мақалада роботтарды оқу үдерісінде қолдану білім алушылардың инженерлік мəдениет саласында негізгі түсініктерін қалыптастыруға, жаратылыстану жəне нақты ғылымдар саласына қызығушылықтарын арттыруға, қолданбалы тапсырмаларды орындауда білімгерлердің стандартты емес ойлау қабілетін, шығармашылығын дамытуға, сондай-ақ ізденушілік дағдыларын қалыптастыруға үлкен мүмкіндік беретіні талданылады.
Ақпараттық технологиялар дамуының белсенділігінің артуы мен олардың қоғам салаларына тереңінен енуі дайын өнімдерді, интеллектуалды міндеттерді жеңілдетудің сапалы дамуын талап етеді. Жаңа технологиялардың оқыту үдерісіне енгізілуін студенттің шығармашылық, интеллектуалды дамуын арттыру деп түсінеміз. Толық жетілген жасанды интеллект құру адамзат алдына қоғамның барлық бағыттарында жаңа мүмкіндіктер береді. Жасанды интеллект психология, физиология, лингвистика жəне басқа да ғылымдардың қиылысында орналасқан, күрделі проблемаларды шешімімен айналысатын информатиканың бір аймағы болғандықтан, жасанды интеллектуалды жүйелер құруда жəне оларды игеруде сапалы білім беру бүгінгі күннің басты талаптарының бірі болып отыр. Жалпы интеллект сөзі латынның «Іntellectus» — ақыл-ой, ес, адамның ойлау қабілеті дегенді білдіретінін ескерсек, жасанды интеллект технологияларымен жұмыс iстеу, қолданушының тек алгоритмдiк процедуралармен шектеліп қана қоймай, өзiн-өзi дамыту белсендiлiгiн арттыруға ықпал ете отырып, оның интеллектуалдылық дəрежесінің қалыптасу үдерісiне оң əсер ететіні анық. Əрине, оқу үдерісімен қатар, өндірістің бар салаларында кең қолданыс тапқан бұл жүйе əлі де зерттеулерді, тəжірибе жасап, оларды қоғамда тереңдеп енгізуді талап ететіні белгілі.
Жасанды интеллект тірі интеллектуалды жүйелердің функциясын жасанды жүйелерге беру тəсілдерін жасауға бағытталған. Жасанды интеллектің даму тарихына тоқталатын болсақ, ежелгі заманғы адамдарда күрделі есептер шешуге ұмтылып, адам ойын модельдеуге жасанды интеллектті пайдаланды. Ежелгі Египетте Амона құдайының механикалық статуясы шықты. Дегенмен, жасанды интеллект бастамасын бастаған орта ғасырлық испан философы, математигі жəне ақыны Раймонд Луллий деп есептелінеді. Ол XVІІІ ғ. əртүрлі есептерді шешуге арналған механикалық машина құрастыруға ұмтылды. XVІІІ ғ. Лейбниц жəне Декарт бір-біріне қатыссыз осы идеяны жалғастырды. Осы атқарылған жұмыстарды жасанды интеллекттің теориялық бастамасы деп түсінуге болады. Электронды есептеуіш машинасы пайда болғаннан кейін XX ғ. 40-шы жж. жасанды интеллект ғылым ретінде қалыптасты. Осы уақытта Норберт Винер жаңа пайда болған ғылымға «Кибернетика» деген жұмысын жазды. 1956 ж. Дартсмут колледжінде (АҚШ) өткен семинарда осы сала «Жасанды интеллект» (АІ–artіfіcal іntellіgencel) атауын меншіктеді. Бұл семинар есептерді логикалық түрде шешу əдістеріне бағытталды. Кейіннен жасанды интеллект ғылымы «Нейрокибернетика» жəне «Кибернетиканың қара қорабы» («Кибернетика черного ящика») болып екіге бөлінді. Ал ең алғаш «робот» сөзін чех жазушы–сатиригі Карл Чапек ағасы Йозефпен бірлесіп, «R.U.R» («Rossum's
Universal Robots», 1917 ж., 1921 ж. жарыққа шықты) өзінің пьесасы үшін ойлап тапқан [1]. Алғашқы роботтар деп орта ғасырдағы механикалық қуыршақтарды да айтуға болады. Шамамен 1736–1738 жж. инженер, математик жəне музыкант Жак де Вокансон флейтада ойнай алатын қуыршағына бағдарлама ретінде жұдырықты механизмді, немесе қатарласып орналасқан барабанды, қолданды. Ол қуыршақ флейтада он екі түрлі əуен орындай алды жəне де саусақтарын шынайы қимылдатып, еріндерін жыбырлата отырып, флейта тесіктерінен кəдімгі ауа шығаратын. Ж. де Вокансон сонымен қатар жүре алатын, қанаттарын қимылдата отырып, дыбыс шығара алатын, су ішетін, дəндерді шоқитын жəне оларды ішкі диірменімен ұсақтай алатын үйректі жасап шығарды (1741 ж.). Үйрек 1000-ға жуық бөлшектерден тұрды жəне сол заманда жасалған роботтардың үздігі деп танылды (1-сур.). Өкінішке орай, Париж ғылым академиясының академигі, ұлы инженер- механиктің бір де бір жұмысы біздің заманымызға дейін жетпеген.
Жасанды интеллекттің бір бағыты болып табылатын роботты техника (робот жəне техника, ағылшын тілінен аударғанда robotics — роботика) — автоматтандырылған техникалық жүйелерін əзірлейді жəне өндірістің қарқынды дамуына маңызды техникалық негізі болып табылатын қолданбалы ғылым. Құрылыс, өнеркəсіп, тұтыну, авиация жəне төтенше қызмет (əскери, ғарыш, су асты) салаларында роботты техника кеңінен қолданылады. Роботты техника құбылыс ретінде технологияның табиғи логикалық жалғасы болып табылады. Кез келген еңбекті автоматтандыру қарқынын адамдар біртіндеп көптеген қызмет салаларында ығыстырып, фильмдер көруге, дайвингке, компьютерлік ойындарға жəне тағы да басқа істермен айырбастауға қарқынды күш қолданып жаңа мүмкіндіктер берді. Жалпыға ортақ еңбектің өндіріс құралдарын өндіру үшін адамзаттың жұмсағаны емес, соңғы өнім тұтыну біртіндеп 100 %-ға ұмтылып, артып келеді. Қазірдің өзінде көптеген заманауи ең күшті роботтардың жұмыс күші: машиналар, автомобильдер, компьютерлер жəне тағы сол сияқты машиналар өндірісіне бағытталған.
Қазіргі таңда көптеген елдерде білім беру үдерісінде роботтық техника негіздерін оқыту үлкен сұранысқа ие. Негізгі тапсырма жастарды инженерлік мамандықтарға жəне ғылымға назарын аударту болып отыр. Бұл идеяны жетілдіру үшін роботтардың Дүниежүзілік олимпиадасы (aғылш. World Robot Olympiad, WRO) 10–18 жас аралығындағы мектеп оқушыларының жарысы — роботтардың Халықаралық жарысы (МСР) өткізіледі. Бірінші фестиваль 2004 ж. Сингапурде өткізіліп, оған 32 елден 1000-нан астам дарынды оқушылар қатысты. Роботтарды келесі категорияларға бөлуге болады: өнеркəсіптік роботтар, əскери (радиомен басқарылатын машиналар, саперлер), тұрмыстық (капсулды кофемашиналар, ақылды шаңсорғыштар), медициналық, транспорттық (Amazon қоймасындағы автономды роботтар), сервистік (аэропортта көмек берушілер), экзоскелеттер (адам денесінің кеңейтілген мүмкіндіктері, қимыл-тірек аппаратының шығындалған функциясын қалпына келтіру), адам секілді ( Honda компаниясы «Asimo»), қадамдап жүретін, космостық.
Роботтық техниканы үш бағытқа бөлуге болады:
- білімділік;
- жарысатын;
- шығармашылық.
Қазіргі уақытта білім алушылар роботтық техникамен сабақтан тыс кезде жəне таңдау курстарында шұғылдана алады. Бұндай сабақтарда жарысатын бағыт басым болады. Дəлірек
айтқанда, жарысатын компонент айқын түрде қатысады. Білімділік бағыты жанама түрде тек техникалық бағытпен айқындалады. Бұл бағытқа тісті-белдікті берілулер, айналдыру кеңістігін өзгерту, дөңгелек диаметрінің өткен ара-қашықтығын өзгерту, сызық бойынша жылжу технологиясы, объектілерді тану жəне т.б. Сондай-ақ іс-əрекетті жүзеге асыратын роботқа алгоритмдеу жəне бағдарламалау дағдыларын арттыратын компонент, тест жəне қалпына келтіру бағдарламалары болады [2].
Қазіргі уақытта əдебиеттерде роботты техникалық жүйелерді үш буынға бөледі. Заманауи өндірісте пайдаланатын роботтардың көбі бірінші буынға жатады. Олардың басқару жүйесінің есептеуіш қуаты төмен болып табылады (кейде нөлге тең). Мұндай роботтың жалғыз «интеллектуалды» функциясы — оператормен берілетін əсер тізбегін есте сақтауында. Олар жұмыс істейтін технологиялық жағдай толығымен детерминирленген болуы керек. Бұған кіретіні тетіктердің нақты тұрақтандырылуы, басқа жабдықтармен кеңістіктік байланыстың нақты анықталуы жəне де құралдарға жақын орналасқан адамдардың қауіпсіздігін қамтамасыз ету керек.
Екінші буынның роботты техникалық жүйелері роботы басқару жүйесіне қымбат емес микропроцессор ендірілгенде пайда болды. Бұл буында манипулятор үзбелерінің қозғалыс элементтерін барлық жылжу дəрежесі бойынша есептеуге мүмкіндік туды. Екінші буын роботтары қозғалып тұрған тасымалдаушының үстінде жатқан тетіктермен жұмыс жасай алады. Кей кездерде жүйеге өзгерістерге бейімделуді қамтамасыз ететін күш сол сəттегі жəне қашықтық өлшегішті бергіштер енгізілді. Екінші буынды роботтарды негізінен автоматты өндіріс процестерімен байланысты жерлерде қолданады: нүктелі пісіру, тозаңдатумен бояу, доғалы пісіру, құрастыру. Екінші буынның роботтарымен жұмыс істеген кезде олардың даму болашағы жетілдірілген бергіштерді қолдану мен басқару жүйесінің есептік қуатының артуына байланысты екенін көруге болады.
Үшінші буынның роботты техникалық жүйелері бірнеше жыл бұрын пайда болды, бірақ олар əлі толығымен зерттеліп болған жоқ. Бұл жүйелердің ерекшелігі бірнеше асинхронды жұмыс істейтін микроЭЕМ қолданылуында, олардың əрқайсысы автономды функцияларды жүзеге асырады. Үшінші буынның типтік роботы əр жылжу дəрежесі үшін арнайы басқару процессорымен жəне де оның жұмысын үйлестіретін орталық процессормен жабдықталған. Орталық процессор басқа да жоғарғы деңгейлі функцияларды орындайды.
Төменгі деңгейлі процессорлардың əрқайсысы өз манипулятор үзбесінің қозғалу жылдамдығы мен ішкі күй бергіштерінің сигналдарын өңдейді жəне де осы үзбе сервобасқару жүйесінің бір бөлігі болып келеді. Орталық процессор бөлек дəрежесі бойынша орын ауыстыруды үйлестіреді, əртүрлі координат жүйелерінде жұмыс істеген кезде координаталарды түрлендіруді орындайды, сыртқы бергіштермен, басқа роботтармен жəне білдектермен өзара əрекет етеді, өз жадысында программаларды сақтайды, байланыс желісі арқылы басқа ЭЕМ ақпаратпен алмасады. Барлық аталып өткен функциялар бір ЭЕМ орындала алады, бірақ жаңа жүйелер мəліметті өңдеудің иерархиялық жүйесін жиірек қолданады. Бұл төменгі деңгейлі процессорларға кететін шығындардың толығымен жүйенің иілгіштігімен жəне қарапайымдылығымен өтелуімен түсіндіріледі.
Басқару түрі бойынша робототехникалық жүйелер биотехникалық, автоматты, интерактивті болып бөлінеді. Биотехникалық жүйелерге командалар (роботтың жекелеген сілтемелерін басқару жəне басқару батырмасы), көшіру (адам қозғалысын қайталау, қолданбалы күштерді, экзоскелеттерді тасымалдайтын кері байланысты жүзеге асыруға болады) жəне жартылай автоматтық (бір командалық органның басқару, мысалы, роботтың бүкіл кинематикалық сызбасының тұтқасы) жүйелер кіреді. Автоматты роботты техникалық жүйелерге бағдарлама (белгілі бір бағдарлама бойынша жұмыс істейді, негізінен сол ортаға бірдей мəселелерді шешуге арналған), бейімделгіш (типтік есептерді шешеді, бірақ жұмыс істеу шарттарына бейімделеді) жəне интеллектуалдық (ең дамыған автоматтандырылған жүйелер) жүйелер кіреді. Интерактивті роботты техникалық жүйелерге автоматтандырылған (автоматтандырылған жəне биотехникалық режимдердің ықтимал ауысуы), қадағалау (адам мақсатты функцияларды орындайтын автоматты жүйелер) жəне диалог (робот адаммен мінез-құлық стратегиясын таңдауға диалогқа қатысады, сондықтан робот, əдетте, манипуляцияның нəтижелерін алдын ала болжауға жəне мақсатты таңдау бойынша кеңес беруге қабілетті сараптамалық жүйемен жабдықталған) кіреді.
Роботтарды басқарудың негізгі міндеттері:
- ережелерді жоспарлау;
- қозғалыстарды жоспарлау;
- күштер мен сəттерді жоспарлау;
- динамикалық дəлдікті талдау;
- роботтың кинематикалық жəне динамикалық сипаттамаларын анықтау.
Роботты басқару əдістерін дамытуда техникалық кибернетика жетістіктері мен автоматты басқару теориясы өте маңызды [3].
Біздің І. Жансүгіров атындағы Жетісу мемлекеттік университетінінің «Біліктілікті арттыру жəне қосымша білім беру орталығында» «Роботтық техника» секторы орналасқан. Сонымен қатар «Ақпараттық технологиялар» кафедрасында «Жасанды интеллект жүйелері», «Интеллектуалды робототехникалық жүйелер», «Робототехникалық жүйелерді программалау», «LEGO программалауына кіріспе» сынды пəндері оқытылып, роботтық техниканың негізі беріледі. Университет базасында Lego Mindstorms конструкторлары мен Bioloid. Robotis Premium адам тəріздес роботтары бар. Осы роботтар оқу үрдісінде қолдану білім алушылардың инженерлік мəдениет саласында негізгі түсініктерін қалыптастыруға, жаратылыстану жəне нақты ғылымдар саласына қызығушылықтарын арттыруға, қолданбалы тапсырмаларды орындауда білімгерлердің стандартты емес ойлау қабілетін, шығармашылығын дамытуға, сондай-ақ, ізденушілік дағдыларын қалыптастыруға үлкен мүмкіндік береді.
Lego Mindstorms констурторлары программаланып (электронды блоктар мен кішігірім құралдар жиыны), əрбір білімгердің талабына сəйкес көптеген командаларды орындайды. Халықаралық жарыстардың көпшілігі осы компания роботтарының қатысуымен өткізілетіндіктен, негізі конструктор ретінде жасалынған бұл роботтар оқу үдерісіне енгізілген. Lego Mindstorms Education EV3 бастапқы жинағы 10 мен 21 жас аралығындағы қолданушыларға арналған. Жинақта Lego Technic сериясымен үйлесімді 500-ден астам бөлшек бар. Жинақ бірнеше топтарға бөлініп шығарылады: кластарға, жеке пайдаланушыға жəне ресурсты. Жинақтың негізгі құрамы: 1 EV3 микрокомпьютері; 2 үлкен сервомотор; 1 орташа сервомотор; 2 жанасу құрылғысы; 1 түстерді ажыратқыш құрылғысы; 1 ультрадыбыс құрылғысы; 1 гироскоп құрылғысы. Lego Mindstorm Education жиынтығының негізгі элементі – EV3 модулі, ол бағдарламалық интеллектуалдық модуль, мотор жəне датчиктерді басқару, сымсыз қосылуды іске асыратын қызметтер көрсетеді (2-сур.).
Үлкен мотор — жұмыс қызметін қуатты жəне тура бағдарламалайды. Орта мотор — тұрақтылықты сақтайды, бірақ жылдам реакция жəне компакті көлем үшін қуаттылықты азайтады. EV3 модулі — жұмыстың энергетикалық станциясы мен басқару орталығына қызмет етеді. Ультрадыбысты датчик — датчиктер арасындағы жəне басқа да заттардың қашықтығын өлшеуде дыбыстық толқындарды қолданады. Түс жəне жарық датчигі — əртүрлі жеті түсті таниды жəне түс
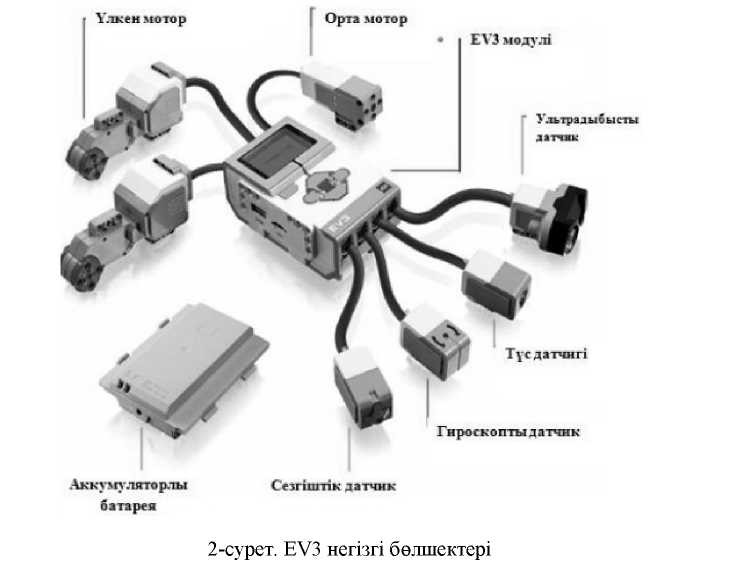
ашықтылығын айқындайды. Гироскопты датчик — роботтың бұрылуын, жылдамдығын өлшейді. Сезгіштік датчигі — үш шартты анықтайды: жақындастық, босатушылық, шерту. Аккумуляторлы батарея — экономды, зиянсыз жəне қолайлы қуат көзі [4].
5В070300 – «Ақпараттық жүйелер» жəне 5В060200 – «Информатика» мамандықтарының студенттері, 3-суретте көрсетілгендей, көптеген Lego роботтарын құрастырып шығарды. Сонымен қатар студенттер Bioloid. Robotis Premium адам тəріздес роботтарын да құрастырады (4-сур.).
Жоғарыда айтып өткендей, бұл роботтардың Lego роботтарынан артықшылығы — бірнеше асинхронды жұмыс істейтін микроЭЕМ қолданылуында, олардың əрқайсысы автономды функцияларды жүзеге асырады. Bioloid Premium — денесін өзі тіктей алатын, еркін жүріп, көптеген қимылдар жасай алатын адам тəріздес робот. Құрамына гироскоп, арақашықтық датчигі, инфрақызыл

модуль сынды бірнеше датчиктер кіреді. ИҚ жəне Zigbee модулдері арқылы арақашықтықтан басқару мүмкіндігі бар. Робот С тілінде бағдарламаланады. Жиынтықтан гуманоидты, өрмекшіні, динозаврды жəне өзге де модельдерді құрастыруға болады.
Роботтар — қарқынды дамып келе жатқан болашақтың жоғарғы технологияларының бірі. Қазіргі кезде роботтар өміріміздің көптеген саласына, атап айтқанда, ғарышты игеру, денсаулық сақтау, өндіріс, қоғамдық қауіпсіздікті қамтамасыз ету, қорғаныс ісі жəне басқа да салаларға еніп үлгерді. Қазақстан Республикасында өнеркəсіптің жеделдетіле индустрияландырылуы, жаңа технологиялардың қарқынды дамуы өскелең ұрпақты жоғарғы білікті техникалық сала мамандары ретінде даярлауды қажет етеді. Ендеше, сол ұрпағымызға роботтық техниканы жедел əрі сапалы меңгертуді жаңа заманымыздың өзі талап етіп отыр. Болашақ — роботтық техникада.
Əдебиеттер тізімі
- Юревич Е . И. Основы робототехники / Е . И . Юревич. — СПб.: БХВ- Петербург, 2010. — 368 с.
- Каширин Д.А. Курс «Робототехника»: внеурочная деятельность: метод. реком. для учителя / Д.А. Каширин, Н.Д. Федорова, М.В. Ключникова; под ред. Н.А. Криволаповой. — 2-е изд., доп. перераб. — Курган: ИРОСТ, 2013. — 80 с.
- Мухтарова А. Ж. Білім беру үрдісінде роботтардың қазіргі жағдайы мен даму болашағы: XI Халықарал. студенттер жəне жас ғалымдардың ғыл. конф. «Ғылым жəне білім – 2016» / А.Ж. Мухтарова. — Астана: ЕҰУ, 2016. — 651 б.
- Жантасова Ж.З. LEGO Mindstorms EV3 үлгі негізінде роботтарды құрастыру жəне бағдарламалық басқару: оқу құралы / Ж.З. Жантасова, А.С. Кадырова, А.К. Садакбаева, А.Е. Икенова. — Өскемен, 2016. — 9, 10-б.